5.2 Schnittstellen anschließen
Typ
Stecker
Dose
DSL
6
10
Temperatur
9
5
Tabelle 1: Position Stecker/Dose
5.2.1
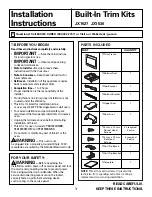
DSL-Dose
1
2
3
4
Abbildung 3: JST BM04 B-GHS-GB-TBT (vergoldet) – Steckerbelegung geräteseitig
PIN
Signal
1
Nicht belegt (Ersatz)
2
US+ / DSL+
3
GND/DSL-
4
Nicht belegt (Ersatz)
5.2.2
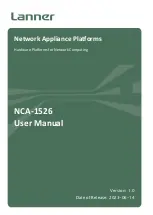
Temperatursensor-Stecker
2 1
Abbildung 4: Harwin M80-8820242 – Steckerbelegung geräteseitig
PIN
Signal
1
T+
2
T- / GND
5.2.3
Empfohlene Komponenten
Kabelstecker
Stecker
Typ
DSL
JST GHR-04V-S (Gehäuse) SSHL-002GA1-
P0.2 (Kontakt, vergoldet)
Temperatur
Harwin M80-xxx-02-XX
Tabelle 2: empfohlene Stecker
5.3 Vorgehensweise bei der elektrischen Installation
1.
Falls erforderlich, vorsichtig die Abdeckung (7) vom Encoder (12) entfernen.
Falls erforderlich, die Torx-Schraube T08 (8) mit einem Schraubendreher
herausdrehen.
2.
Den Stecker für den DSL-Litzensatz (6) in die DSL-Dose (10) am Encoder ste‐
cken – ausreichend tief, damit er einrastet, aber ohne mechanische Belas‐
tung.
3.
Optional: Die Dose für den Temperatursensor (5) ohne mechanische Belas‐
tung in den Temperatursensor-Stecker (9) stecken.
4.
Die Abdeckung (7) montieren und die Torx-Schraube T08 (8) festziehen.
Anzugsdrehmoment: 0,5 ± 0,05 Nm.
5.
Optional: Mit einer selbstschneidenden Schraube M2.5x5 die abgeschirmte
Ader der DSL-Litze an den Schirmanbindung (13) anbringen.
5.4 Signale des Motor-Feedback-Systems
Das Motor-Feedback-System kann folgende Signale emittieren:
HIPERFACE DSL
®
Schnittstelle:
•
US+ / DSL+: Versorgungsspannung für den Encoder mit überlagerndem
positiven Datensignal. Die Versorgungsspannung des Encoders liegt zwi‐
schen +7 V DC und +12 V DC.
•
GND/DSL-: Versorgungsspannung für den Encoder mit überlagerndem nega‐
tiven Datensignal.
•
T+: Sensorsignal für den passiven Temperatursensor/thermischen Wider‐
stand.
•
T- / GND: Referenzmasse für das Sensorsignal des passiven Temperatursen‐
sors/thermischen Widerstands.
6
Inbetriebnahme
Bei der Inbetriebnahme des sicheren Motor-Feedback-Systems wird davon ausge‐
gangen, dass der Hersteller des verbundenen Antriebssystems alle für dessen
Auslegung geltenden Sicherheitsanforderungen, die in der technischen Informa‐
tion „HIPERFACE DSL
®
MASTER“ beschrieben sind, eingehalten hat.
6.1 Kontrollen
Bei Inbetriebnahme ist sicherzustellen, dass ein sicheres Motor-Feedback-System
EDS35-2 / EDM35-2 und nicht ein Standard-Motor-Feedback-System
EDS35-0 / EDM37-0 eingesetzt wird.
Darüber hinaus muss bei einem sicheren Motor-Feedback-System
EDS35-2 / EDM35-2 nach durchgeführtem Encoder-RESET (Hardware-oder Soft‐
ware-RESET) das POST-Bit (Power-On-Self-Test) gesetzt sein. Das POST-Bit kann
nach erfolgter positiver Prüfung quittiert werden (siehe technische Information
„HIPERFACE DSL
®
MASTER“).
Bei Änderung des Positionsoffsets des Motor-Feedback-Systems über die Res‐
source 101h („Position setzen“) oder 108h („Fabrikeinstellungen“) muss
anschließend verifiziert werden, dass der Sensor den gewünschten Positionswert
liefert.
Im Betrieb sind keine weiteren prüfenden Maßnahmen erforderlich.
WARNUNG
Die Lebensdauer beachten!
Die sicheren Motor-Feedback-Systeme EDS35-2/EDM35-2 haben eine maxi‐
male Lebensdauer, nach der sie in jedem Fall außer Verkehr gebracht werden
müssen. Zusätzlich zur Gebrauchsdauer muss auch die Lebensdauer der
Lager berücksichtigt werden. Der Parameter, der in Abhängigkeit von der
Anwendung als erster erreicht wird, bestimmt den Zeitpunkt der Außerbe‐
triebsetzung des Systems.
Das Baujahr des Motor-Feedback-Systems wird im Geräteetikett bzw. im Verpa‐
ckungsetikett als ein vierstelliger Code angegeben (yyww). Die beiden ersten Stel‐
len (yy) bezeichnen das Baujahr (ohne Jahrhundert), die beiden letzten Stellen
(ww) die Kalenderwoche des letzten Herstellungsprozesses.
7
Technische Daten
Technische Daten
Singleturn
Multiturn
Performance
Auflösung pro Umdrehung
20 Bit
24 Bit
20 Bit
24 Bit
Signalrauschen (σ)
1
± 3“
± 1“
± 3“
± 1“
Systemgenauigkeit
2
± 50“
± 25“
± 50“
± 25“
Anzahl der absolut nachweisbaren
Umdrehungen
1
4.096
Drehzahl beim Einschalten und
Reset des Motor-Feedback-Sys‐
tems
3
≤ 6.000 min
-1
Verfügbarer Speicherbereich
8.192 Bytes
Schnittstelle
Codesequenz
Erhöhung bei Drehung der Welle. Im Uhrzeigersinn mit
Blick in Richtung des „A“ (siehe Maßzeichnung).
2
HIPERFACE DSL
®
Schnittstellensi‐
gnale
4
H-DSL 2-adrig: digital, RS485 kombiniert mit Strom
Initialisierungszeit
5
Max. 500 ms
Messung externer Temperaturwider‐
stand
6
Ausgabeformat: 32 Bit ohne Vorzeichen; Ausgabeein‐
heit: 1 Ω; Messbereich: 0 ... 209 600 Ω Zusätzliche
Umrechnungsfunktion von PT1000 zu KTY84-130
Elektrische Daten
Betriebsspannungsbereich/Versor‐
gungsspannung
7 V bis 12 V
Einschaltdauer Spannungsrampe
7
Max. 180 ms
Leistungsaufnahme
8
Max 1,0 W (Vs = 7 V bis 12 V)
Mechanische Daten
Abmessungen
Siehe Maßzeichnung
Gewicht
Max. 100 g
Trägheitsmoment des Rotors
5 gcm²
Betriebsdrehzahl
Max. 12.000 min
–1
Max. 9.000 min
–1
Max. Winkelbeschleunigung
250.000 rad/s²
Anlaufdrehmoment bei 20 °C
≤ 0,4 Ncm
Zulässige axiale Wellenbewegung
(st dynamisch)
± 1 mm
Zulässige radiale Wellenbewegung
(dynamisch)
± 0,025 mm
Lebensdauer der Kugellager
50.000 h bei 6.000 U/min (bei einem definierten
Messpunkt von 70 °C)
Umgebungsbedingungen
Betriebstemperaturbereich
9
–40 bis +115 °C
Lagertemperaturbereich
–40 bis +125 °C (ohne Verpackung)
Höhenlage beim Betrieb
≤ 2.000 m über dem Meeresspiegel. (80 kPa)
Relative Luftfeuchte/Betauung
90 % (Betauung nicht zulässig)
Widerstandsfähigkeit gegenüber
Schocks
1.000 m/s
2
/6 ms (gemäß EN 60068-2-27:2009)
Widerstandsfähigkeit gegenüber
Vibration
500 m/s
2
/10 … 2.000 Hz (gemäß
EN 60068-2-6:2008)
Schutzklasse
10
IP40 gemäß IEC 60529:2014
EMV
11
Gemäß EN 61000-6-2:2016, EN 61000-6-4:2006,
IEC 6100-6-7:2014
Sicherheitstechnische Kenngrößen
Sicherheits-Integritätslevel
12
,
13
SIL2 (IEC 61508:2011), SILCL3 (EN 62061:2010)
Systematische Eignung
13
SC3 (IEC 61508:2011)
Kategorie
3 (EN ISO 13849-1:2015)
Testrate
24 h
8022479 /14FB/2019-06-19/de, en, es, fr, it
EDS35-2.../EDM35-2... | SICK
3