

























Assembly
6.3.2 Turbo Connection
The robot coupling has a turbo connection.
When compressed air is applied, it supports the spring-actuated
locking procedure actively with air pressure to increase the pull-in
force even further. After a short pressure pulse via the
compressed air supply, it can be switched off again - the clamping
system remains spring-loaded. In the dynamic work process,
switching on the turbo function is recommended.
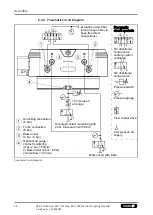
There is the option of controlling the clamping system either via
the side G1/8" air connection hole or a hose-free direct connection
on the base side. The air connection that is not connected must be
sealed air-tight with a G1/8" locking screw or an M6 set-screw (on
the base side) (see chapter "Assembly Drawings"
NOTE
On a dynamically operated handling system, the robot module can
only lift loads if the turbo function has been switched on
beforehand.
6.3.3 Air Purge Connection with Cleaning Function
The robot coupling has an air purge connection with a G1/8"
thread on the lower housing cover for the clamping system. This
connection can be used, for example, to blow out the coupling
interface or to also monitor the presence of the clamping pallet
using a differential pressure switch.
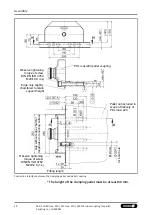
For interface cleaning, the NSR maxi 220 has two air connections
at the side for the blow-out or cleaning function using a G1/8"
connection thread.
The positively driven air flow is released on the centering and
locating surfaces of the clamping system. The NSR maxi 220
therefore has a cleaning function on all contact surfaces of the
entire coupling interface.
The air for the blow-out function is supplied via two hose lines on
a duct system connected to two separate channel systems.
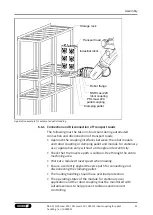
It is advisable to use the air purge function if the clamping module
approaches the pallet coupling. The two system components to be
coupled are cleaned of dirt and chips.
The following must be taken into account when controlling the
NSR maxi 220 robot coupling:
• Max. pressure of the air purge: 6 bar
•
The air purge must be switched off again before the pallet
coupling is locked fully in the robot module, as an air cushion
can otherwise form.
23
09.00 | NSR maxi 220 / PKL maxi 220 | VERO-S robot coupling for pallet
handling | en | 0489051
Содержание NSR maxi 220
Страница 46: ...Appendix 46 09 00 NSR maxi 220 PKL maxi 220 VERO S robot coupling for pallet handling en 0489051 13 Appendix ...
Страница 47: ...Appendix 47 09 00 NSR maxi 220 PKL maxi 220 VERO S robot coupling for pallet handling en 0489051 ...
Страница 49: ......
Страница 50: ......
Страница 51: ......







































































