




























7-18
EB 6493 EN
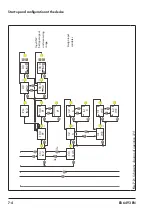
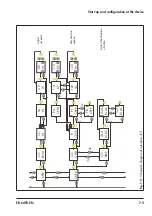
Start-up and configuration at the device
7.3
Tuning the control parameters
The controller must be adapted to the dynamic behavior of the controlled system over the pa-
rameters
KP
,
TN
and
TV
to ensure that errors caused by disturbances can be eliminated or
largely suppressed. It is possible to tune these parameters either by performing the function
-CO- TUNE Start-up adaptation
(see section 7.3.3) or by manual tuning.
7.3.1
Empirical tuning method
The following empirical method can be used to tune control parameters. This method is mere
-
ly intended as a guide and not a one-size-fits-all solution.
Proceed as follows for a PI controller
1.
Switch to manual mode (
).
2. In the CNTR menu, set the function
-CO- C.PID
= PI CP.YP.
3. In the PAR menu, set the parameters
KP
= 0.1 and
TN
= 9999 s.
4. In the operating level, set the set point
W
to the required value.
Î
Press to select
W
and use the cursor keys ( ,
). to set the value.
5. In the operating level, change the manipulated variable
Y
so that the controlled variable
X
has the same value as the set point
W
(error Xd = 0).
Î
Press to select
Y
and use the cursor keys ( ,
) to set the value.
6.
Switch to automatic mode (
).
7. In the PAR menu, step up the
KP
parameter until the controlled system shows a tendency
to oscillate.
Every time the
KP
increases, let the controlled system oscillate, e.g. by making small
changes to the set point.
8. In the PAR menu, reduce the
KP
parameter again until the controlled system stops oscillat-
ing.
9. In the PAR menu, step up the
TN
parameter until the controlled system shows a tendency
to oscillate. Every time the
TN
increases, let the controlled system oscillate, e.g. by mak
-
ing small changes to the set point.
10. In the PAR menu, reduce the
TN
parameter again until the controlled system stops oscillat-
ing.
11. Change the set point slightly and check the transient behavior. If necessary, retune
KP
and
TN
until the closed loop shows a satisfactory control behavior.
Содержание Trovis 6493
Страница 6: ...Contents EB 6493 EN...
Страница 22: ...3 10 EB 6493 EN...
Страница 30: ...5 6 EB 6493 EN...
Страница 36: ...6 6 EB 6493 EN...
Страница 72: ...8 12 EB 6493 EN...
Страница 84: ...11 2 EB 6493 EN...
Страница 86: ...12 2 EB 6493 EN...
Страница 88: ...13 2 EB 6493 EN...
Страница 90: ...14 2 EB 6493 EN...
Страница 92: ...15 2 EB 6493 EN...
Страница 95: ...EB 6493 EN 16 3 Certificates TR CU certificate...
Страница 96: ...16 4 EB 6493 EN Certificates...
Страница 97: ...EB 6493 EN 16 5 Certificates...
Страница 98: ...16 6 EB 6493 EN...
Страница 125: ......
Страница 126: ......
Страница 127: ......





















































