





























DIGITAL TRANSDUCER
Configuration and Modbus Interface
PRELIMINARY
PCS III Technical Description CANopen 1r1 UK 310715.docx
09/02/2021
S2Tech srl
31
/
58
14.1.
Error messages
The following error messages (see Table 4) are covered by an emergency message (Emergency
Object)
CAN
–
Other CAN-specific hard- or software errors. This includes such errors as:
▪
Send or receive queue overflow,
▪
Change of CAN controller from error-active to error-passive state, etc.
Error code
additional
error code
error-
code
Meaning
0000
0000
CAN communication module is error-free, Transducer is ready
0001
5000
CAN controller: data buffer overflow
0101
5000
CAN Error State Set: CAN controller is in the error-passive state
0201
5000
CAN-Bus-Off: CAN controller is not responding
0003
6000
RX-Queue: overflow
0004
6000
TX-Queue: overflow
0005
6000
Node-Guarding failure
Table 4: Emergency Object error messages
15.
Parameterization of the CANopen interface with SDO Services
The transducer CANopen interface can be configured by means of the SDO protocol; Transducer
must be the only node connected to a CANopen Master during this operation, this is a mandatory
condition to correctly perform the parameterization.
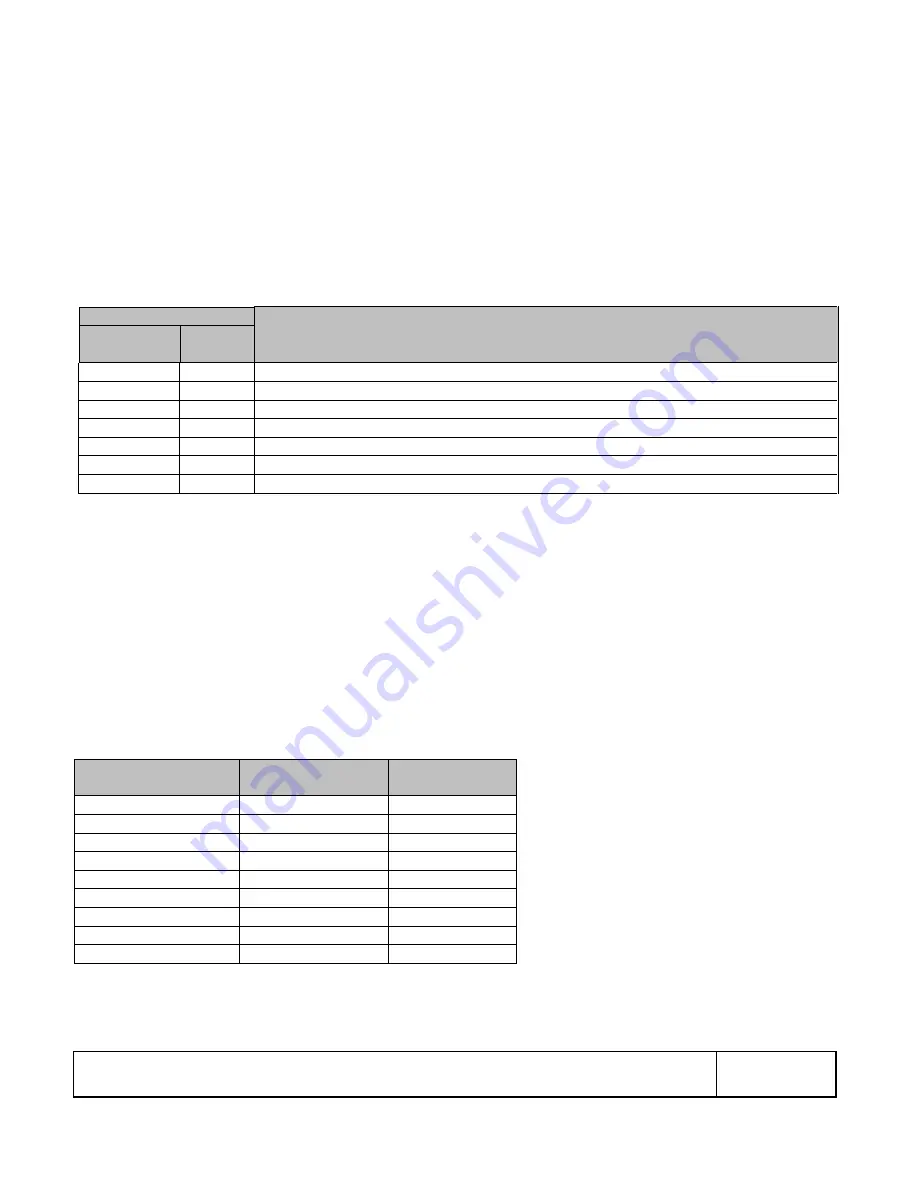
15.1.
Assigning baud rate
The baud rate can be changed using the SDO service, by setting the desired value into the
Baudrate parameter of the S2Tech Manufacturer’s Profile. The selection of the maximum p
ossible
baud rate is determined by the length of the entire CAN bus cable.
Default baud rate is 500kBaud.
Line length in m
Baud rate in
kBaud
Data-byte 3
<25
1000
00
<50
800
01
<100
500
02
<250
250
03
<500
125
04
<500
100
05
<1000
50
06
<2500
20
07
<5000
10
08
Table 5: Baud rate as a function of cable length per DS 301







































































