





























Palletizing Solution - Instruction Manual
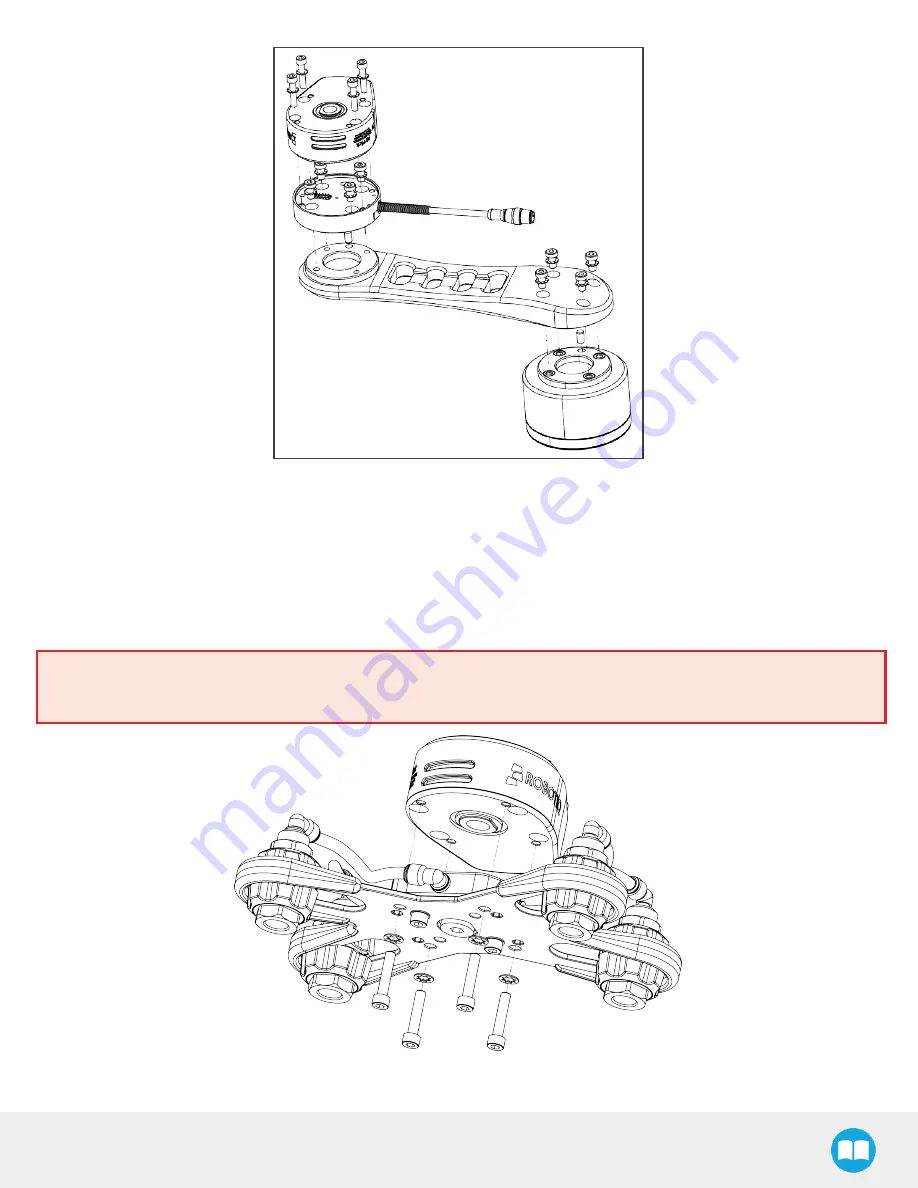
If the two or four suction cups bracket is needed:
1. Align the flat surface on the manifold with the shoulder of the vacuum generator.
2. Secure the manifold by inserting screws and tooth lock washers in a cross pattern to properly compress the O-ring of the gen-
erator.
3. Insert each suction cup, with an O-ring, into an air node. Tighten cups by hands.
Warning
Any unused manifold port should be covered with a provided port plug to avoid air leakage.
40
Содержание PALLETIZING SOLUTION AX Series
Страница 4: ...Palletizing Solution Instruction Manual 4 ...
Страница 14: ...Palletizing Solution Instruction Manual 14 ...
Страница 21: ...Palletizing Solution Instruction Manual 21 ...
Страница 33: ...Base Cover Plate 1 Remove the cover plate that will allow the cable management 33 ...
Страница 84: ...6 1 2 AirPick Vacuum Gripper Fig 6 1 AirPick general dimensions 84 ...
Страница 85: ...Palletizing Solution Instruction Manual 6 1 3 Extra Reach Bracket 85 ...
Страница 86: ...6 1 4 Bracket for Two 2 Suction Cups Fig 6 2 Two air nodes bracket s dimensions 86 ...
Страница 113: ...12 2 Safety Connections Fig 12 2 Universal Robots Controller Safety Connections Schema ...







































































