





























3-Finger Adaptive Robot Gripper Instruction Manual
RS485 communication is standard on all 3-Finger Grippers, see the Serial Communication Protocol section. If not using RS485 communication,
simply leave the two wires unconnected.
The 3-Finger Gripper should be supplied with cables that have the following specifications:
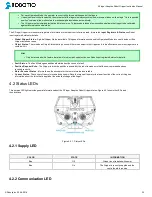
l
Approximate length of 5 meters.
l
DeviceNet standard cable.
l
Power pair :
l
two (2) #22 AWG (black and red).
l
Data pair :
l
two (2) #22 AWG (blue and white).
l
Shield :
l
Foil (data only) #22 AWG.
3.5.2 Communication connection
By default, the power receptacle of the 3-Finger Adaptive Robot Gripper handles the communication via the MODBUS RTU protocol (RS232 or
RS485). The following table summarizes the communication protocols available through the communication receptacle of the Gripper. Note that only
one other protocol option is available in a given Gripper unit (MODBUS RTU protocol always being included). The Gripper that you have was configured
before shipment with only one of the following protocols.
Family
Protocol
Real-Time-Ethernet
EtherNet/IP
Modbus TCP/IP
PROFINET
EtherCAT
Fieldbus
DeviceNet
CANopen
The communication cable and connectors provided with the 3-Finger Gripper model vary with the communication protocol option choice. Each protocol
has its own pin-out and cable. Provided cable has an approximate length of 5m. See details in the following sections for your communication pinout.
Warning
Be sure to use the appropriate cables and pin-outs for your communication protocol as any other setup may damage the Gripper.
DeviceNet communication protocol
Figure 3.5.2.1 shows the pin-out for the DeviceNet communication protocol for the receptacle (male) present on the 3-Finger Adaptive Robot Gripper
and the cable (female) provided with your Gripper.
©Robotiq inc. 2008-2018
18





































































