Manual –TC.GXS
2016-09-16
28 / 43
Template V02.11
4.3.2.
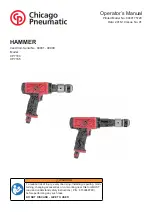
Configuration of the system in parallel
DC+
DC-
1
2
D
um
m
y
pl
ug
DC+
DC-
2
1
Dummy plug
Fig. 9 System in parallel operation. master device
-1
- and slave device
-2-.
Sources
-1-
-2-
Device addresses
Master device and its
address
Master
(AH:0 AL:0)
Slave devices and their
addresses
---
Slave
(AH:1 AL:0)
CAN Bus
CAN Cable connection
---
X101 of Slave 1 is
connected with
X102 of Master.
Dummy plug
1
X101 is terminated with
“CAN TERM interlock”
X102 is terminated with
„CAN TERM“.
Software configuration (TopControl
<CONFIG> tab : Matrix multi-unit system)
<Number of Devices Inline> 1
---
<Number of parallel lines> 2
---
Tab. 15 System configruation
1
One „CAN TERM“ und one „CAN TERM with Interlock“ is necessary.