




























Pleiger Elektronik
GmbH & Co. KG
Page: 18
Manual for 362MC
Edition: 6/2007 Subject to modifications
PID
I
PID
Kw
2
Controller 362MC Typ: CscStep
Actuator
Controlled system
+
Part A
Part B
W
xd
Y
1
V
Y
2
U
X
-
-
Parameter with
3-Point controller for
with parameter
1
st
Parameter set
3-Point-
CtrlTyp, Struct, Kr, Tn, Tv, Vd, Deadbd, Hyst, Ymin,Ymax, Kw
(
1
)
switching output
+
2
nd
Parameter set
switching output
-
Kr, Deadbd, Hyst, Ymin,Ymax
(
2
)
PID
Controller 362MC Typ: Step
Actuator
Controlled system
W
xd
Y
X
I
Controller 362MC Typ: Cont
Actuator
Controlled system
W
xd
Y
X
PID
This enables adaption of the 3-Point controller to two different actuators for o and -. External pa-
rameter switching is not applicable here.
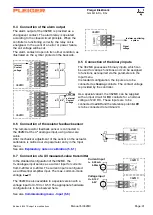
3-Point step controller
= step controller for
I-actuators
with 3PntPW output
In conjunction with the down-line integrating actuator, the internal controller
Step
simulates a continu-
ous controller and has a 3-Point output with feedback. It is thus
only
suitable for use in combination with
integrating actuators, such as motor actuators.
(The operational characteristics of
Step
correspond to those of Pleiger controller
362-D
)
Continuous controller
= controller with continuous output.
The controller output of the continuous controller
Cont
is supplied to the assigned analogue output.
The required hardware configuration of the 362MC is to be observed.
(The operational characteristics of
Cont
correspond to those of Pleiger controller
361-D
).
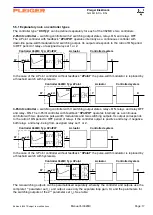
Cascade step controller
= internal interconnection of 2 controllers to create the cascade controller
CscStep
. Controller output Y
1
of the primary controller, with setpoint W and actual value X, is injected
into the secondary controller as setpoint V. In addition to the controlled setpoint V, the secondary 3-Point
step controller also receives secondary actual value U to form output Y
2
.
With setpoint gain KW
2
of the secondary controller can be employed, for example, to bypass the primary
controller during commissioning (Kr
1
=0 switches PID off, Kw
2
results in W=V).







































































