




























Pleiger Elektronik
GmbH & Co. KG
Edition: 6/2007 Subject to modifications
Manual for 362MC
Page: 19
CtrlTyp
CtrlTyp
CtrlTyp
CtrlTyp
CtrlTyp
2PntPW
2PntPW
2PntPW
2PntPW
2PntPW
3PntPW
3PntPW
3PntPW
3PntPW
3PntPW
Step
Step
Step
Step
Step
Cont
Cont
Cont
Cont
Cont
CscStep
CscStep
CscStep
CscStep
CscStep
when controller
or
or
prim. contrl. sec. contrl.
of type
2Point
2Point
2Point
2Point
2Point
3Point
3Point
3Point
3Point
3Point
(Cont)
(
1
)
(Step)
(
2
)
Struct
Struct
Struct
Struct
Struct
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
P
these structures
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
PI
are possible
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PD
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PID
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PD2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
PID2
Y
t
Kr
Tn
PI-Structure
Y
t
Kr
Tv/Vd
PD-Structure
Y
t
Kr
Tn
Tv/Vd
PID-Structure
Y
t
Kr
P-Structure
When the cascade step controller
CscStep
is selected, the primary continuous controller always uses
the 1
st
parameter set (
1
) and the secondary 3-Point step controller uses the 2
nd
parameter set (
2
).
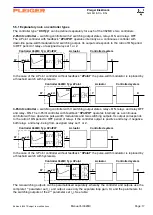
5.5.2 Explanatory note on controller structure
The parameterisable structures for the presented controller types are shown in the following table. On
selecting a controller type, the display always shows only the structures which are parameterisable in
accordance with this table!
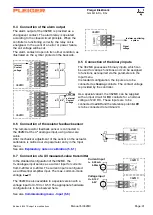
P controller
(proportional-action controller)
In the case of the P controller, a value of the controller output Y is
directly proportionally assigned to each value of the system deviation
xd. The assigned value is set via the gain factor Kr (P gain).
Xp is frequently used instead of Kr.
Xp=100 / Kr
PI controller
(proportional-plus-integral action controller)
In the case of the PI controller, the value of controller output Y is set
proportional to the system deviation xd (P component), and the
I component, which corresponds to the time integral of the system
deviation, is added to this value. The I component is set via reset time
Tn, which corresponds to the time in which the I component effects a
change in the controller output of a magnitude corresponding to the
P component.
PD controller
(proportional-plus-differential action controller)
In the case of the PD controller, a D-component corresponding to the
time differential of the system deviation is added to the controller
output component (P component) which is proportional to system
deviation xd. The D component is set via derivative action time Tv,
which specifies how much earlier the step response of a PD controller
corresponds to a value which is attained by a P controller. A low pass
with the time constant T=Tv / Vd is employed to limit the bandwidth of
the differential element.
PD2 controller
(proportional-plus-differential action controller)
This functions in the same manner as the PD controller, whereby the
D2 component corresponds not to the time differential of system
deviation xd but to the time differential of controlled variable X.
PID controller
(PI controller with added D component)
PID2 controller
(PI controller with added D2 component)
Regarding the D component, see also:
Special function -
Trend compensation (Appendix C1)
.







































































