




























Function description
Operating Manual PMCprimo MC
1003813-EN-03
| 20
– Suitable for networking between the motion controller and a visualisation device or
a PSS 4000, for example.
}
EtherCAT as a drive bus
– EtherCAT is an Ethernet-based master bus system suitable for industrial use. It is
suitable for real-time capable networking between the motion controller PMCprimo
MC and the servo amplifier PMCprotego D.
– The PMCprimo MC acts as Master
– Suitable for applications
– with ≤ 32 subscribers
– with cycle time of 1 ms
}
USB
– For data exchange, see section entitled
USB [
22]
4.1.5.2
CANopen
The CAN network is designed as a linear structure. The CANopen communication protocol
is based on CAN.
}
CAN networking with the motion controller is suitable for applications with a maximum
subscriber number of ≤ 49 and a cycle time ≥ 1 ms.
}
Only CAN devices that are known to the controller or support a corresponding device pro-
file can be operated in the motion controller's CAN network.
}
CAN devices detected by the motion controller are ready for operation immediately after
the initial network run-up. No complex configuration of the CAN devices is required.
}
The overall line length and the length of the stub lines depend on the transmission rate,
see section entitled
Wiring guidelines for the CANopen interfaces [
37]
.
}
Process data objects (PDO) are defined for each CAN device type and cannot be cus-
tomised by the user.
}
For servo amplifiers, the "FS" command can be used to set which process data is to be
exchanged between the motion controller and the servo amplifier (see "PMCprimo Pro-
gramming Manual").
}
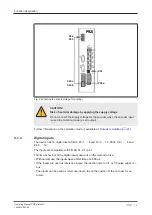
The signal lines must be terminated with resistors (120 Ohm) on the first and last sub-
scriber.
–
Interface X42 (RJ45)
For a PMCprimo MC, a terminating resistor can be activated in the fieldbus junction
box PMCprotego D.CAN-CANbus Adapter or PMCprotego D.CAN-PROFIBUS Ad-
apter. The resistors are generally integrated within the connected devices and must
not be activated there.
–
Interface X51, X52 (9-pin D-Sub connector)
A terminating resistor is permanently installed between Pin 2 and Pin 7. The resistors
are generally integrated within the connected devices and must not be activated
there.







































































