

















Appendix C. Servo Tuning
The tuning process is
a subset of the
controller setup
process that Motion
Planner helps you with
in the Editor.
To assure optimum performance you should tune your servo system. The goal of the tuning
process is to define the gain settings, servo performance, and feedback setup (see command list
below) that you can incorporate into your application program. (Typically, these commands
are placed into a setup program). Servo tuning should be performed as part of the application
setup process, as described below.
To tune your servo system:
1. After you launch Motion Planner, you will see the Editor window. Click on one of the
Application Wizard buttons to launch an application wizard. In the wizard, be sure to
select “Setup Program”. When you are finished with the wizard, icons for the selected
program elements, including the Setup Program, will be placed in the Editor window.
Double-click the Setup icon to launch the setup wizard. As you fill in the wizard
screens, you will come to the Servo Tuner portion ...
2. Click the “Start” button to send the pre-programmed step output to the drive. Notice
that the graph display draws the commanded and actual velocity profiles so that you can
graphically tune your servo system.
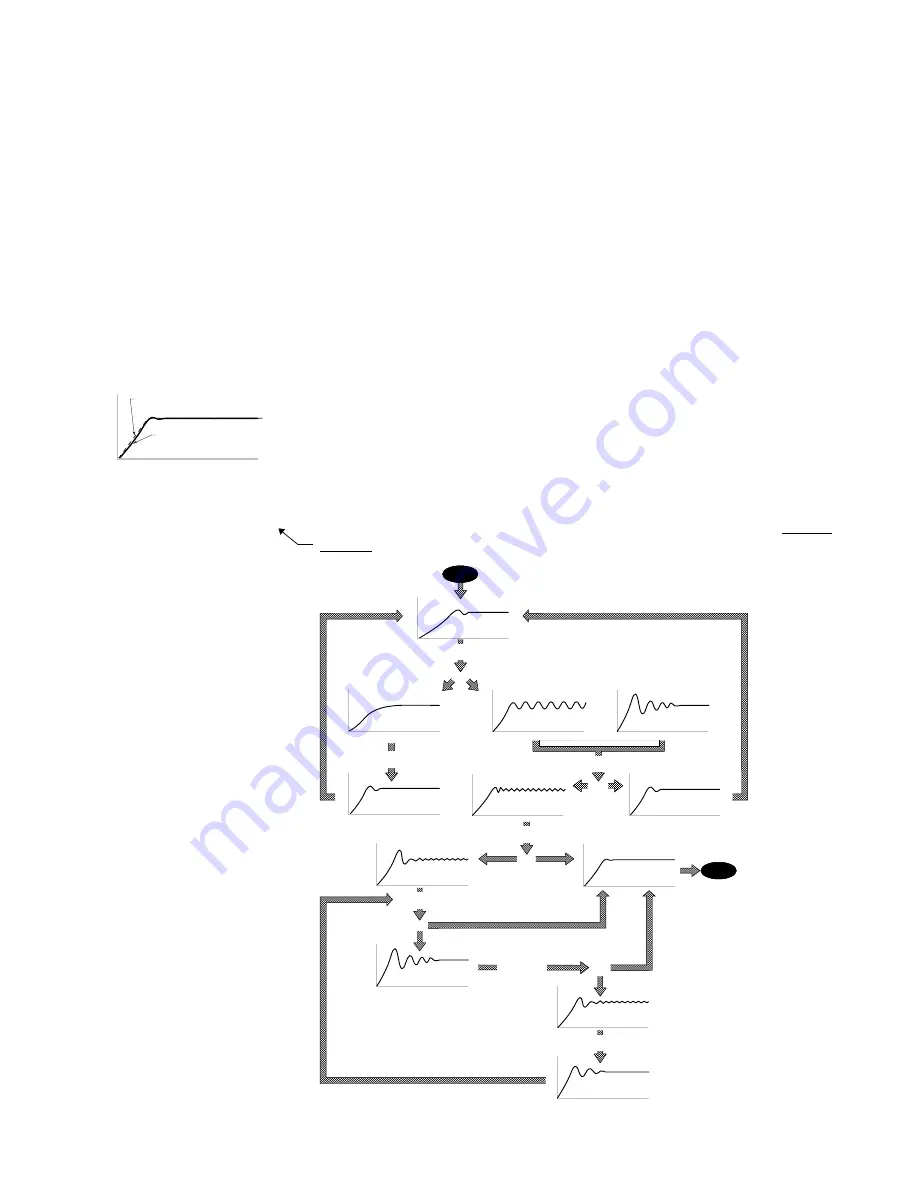
Optimize the proportional (
SGP
) and velocity (
SGV
) values by iteratively changing
gains and viewing the results on the graph display. The object is to achieve a 1
st
order
response (minimal overshoot and close position tracking). The typical process is:
OR
Increase
SGP
UNTIL
OR
Decrease
SGV
UNTIL
Increase
SGV
UNTIL
OR
OR
Decrease
SGV
UNTIL
OR
Decrease
SGP
UNTIL
OR
Decrease
SGV
UNTIL
Increase
SGV
UNTIL
START
STOP
1
st
Order Response:
V
elocity
Time
Commanded Velocity
(dashed line)
Actual Velocity
(solid line)







































































