





























REFERENCE
4.3 List of Pulse_4Axes Parameters
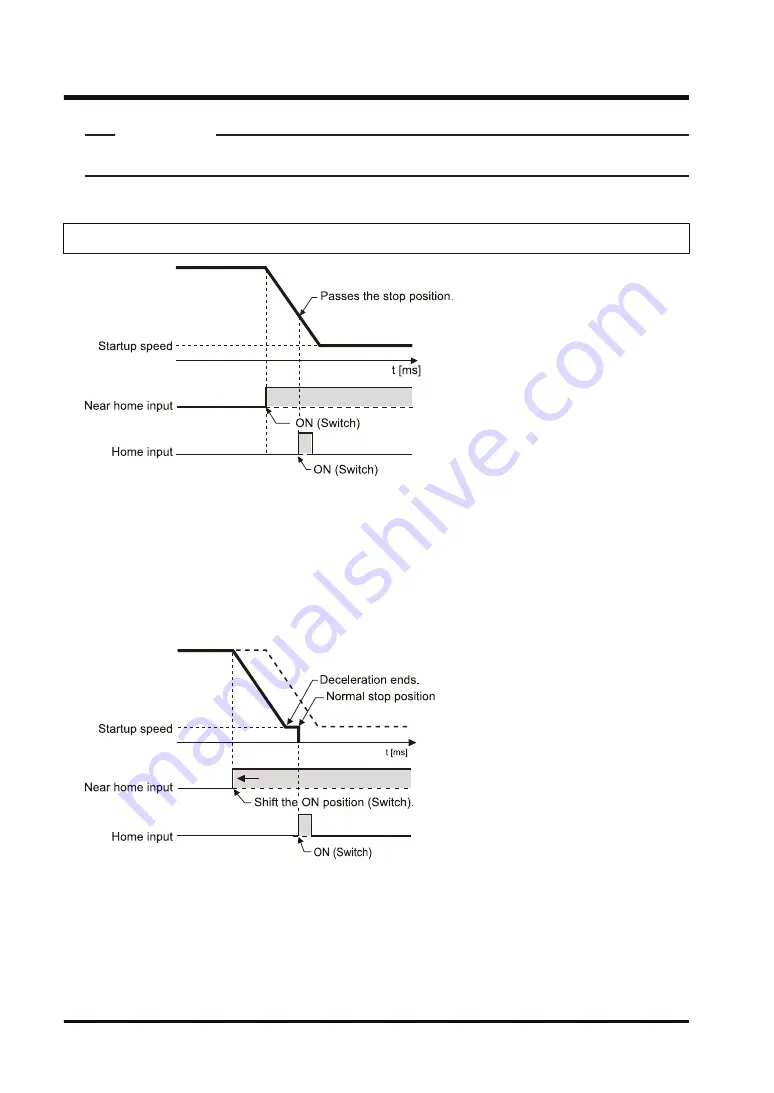
15.3.6 The Stopping Position is OFF for a Home Return
■
Situation
When a home return is carried out, there is a possibility that the speed cannot be slowed
sufficiently. If deceleration cannot be continued down to the startup speed, the unit will not stop
even if there is home input.
■
Solution 1
Shift the position of the near home input switch in the direction of the home return to the
position in the opposite direction.
■
Points to check
If the home input is connected to the Z phase of the servo amplifier, there may be cases in
which the near home input position is close to the home input.
15.3 What to Do If an Error Occurs
15-6
WUME-GM1PG-01
Содержание AGM1PG04L
Страница 2: ... MEMO 2 WUME GM1PG 01 ...
Страница 11: ...1 Before Using This Product 1 1 Safety Precautions 1 2 1 2 Handling Precautions 1 3 WUME GM1PG 01 1 1 ...
Страница 14: ... MEMO 1 4 WUME GM1PG 01 ...
Страница 22: ... MEMO 2 8 WUME GM1PG 01 ...
Страница 42: ... MEMO 3 20 WUME GM1PG 01 ...
Страница 52: ...4 5 Increment and Absolute 4 10 WUME GM1PG 01 ...
Страница 70: ...AccDec 10000 END_CASE 6 1 Sample Program 6 6 WUME GM1PG 01 ...
Страница 82: ... MEMO 7 10 WUME GM1PG 01 ...
Страница 90: ... MEMO 8 8 WUME GM1PG 01 ...
Страница 94: ...AccDec 10000 END_CASE 9 1 Sample Program 9 4 WUME GM1PG 01 ...
Страница 108: ...Current stops when the home or near home position is detected 10 4 Home and Near Home Input Logic 10 12 WUME GM1PG 01 ...
Страница 116: ... MEMO 10 20 WUME GM1PG 01 ...
Страница 124: ... MEMO 11 8 WUME GM1PG 01 ...
Страница 142: ... MEMO 14 4 WUME GM1PG 01 ...
Страница 158: ...16 3 Dimensions 16 3 1 Pulse Output Unit Unit mm 16 3 Dimensions 16 8 WUME GM1PG 01 ...
Страница 162: ... MEMO App 4 WUME GM1PG 01 ...
Страница 163: ...Record of Changes Date Manual No Record of changes August 2021 WUME GM1PG 01 1st edition WUME GM1PG 01 ...
Страница 164: ... MEMO WUME GM1PG 01 ...
Страница 165: ... MEMO WUME GM1PG 01 ...
Страница 166: ...Panasonic Corporation 2021 August 2021 WUME GM1PG 01 ...







































































