





























9 - 27
9 Servo Parameter Objects
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
9-4 An
alog
Con
tro
l Ob
jects
9
•
Select the type of the external encoder to be used.
•
For the set value, refer to the external encoder specifications.
Explanation of Settings
*1
The supported speed is the internal feedback pulse speed [external encoder pulse/s] of the external encoder
that can be processed by the Servo Drive.
Check the instruction manual of the external encoder for the speed range supported by your external encoder.
For example, the maximum speed of a serial communications external encoder with a resolution of 0.01 µm is
4 m/s.
When a serial communications speed of 5 m/s is required, choose a serial external encoder with a resolution of
0.0125 µm or lower.
*2
These are the directions that the Drive counts a 90° phase difference output.
Precautions for Correct Use
Precautions for Correct Use
•
If you set this object to 1 or 2 when an external encoder with a 90° phase difference output is
connected, an External Encoder Connection Error (Error No. 50.0) will occur.
•
If you set this object to 0 when a serial communications external encoder is connected, a
Phase-A Connection Error (Error No. 55.0), Phase-B Connection Error (Error No. 55.1), or
Phase-Z Connection Error (Error No. 55.2) will occur.
3323 hex
External Feedback Pulse Type Selection
Setting
range
0 to 2
Unit
–
Default
setting
0
Data
attribute
R
Size
2 bytes (INT16)
Access
RW
PDO map
Not possible
Set value
External encoder type
Supported speed
*1
0
90° phase difference output type
*2
0 to 4 Mpps (Multiplication × 4)
1
Serial communications type (Incremental type)
0 to 400 Mpps
2
Serial communications type (Absolute type)
0 to 400 Mpps
csp
pp
hm
0.01 [μm/pulse] × 400 [Mpulse/s] = 4 [m/s]
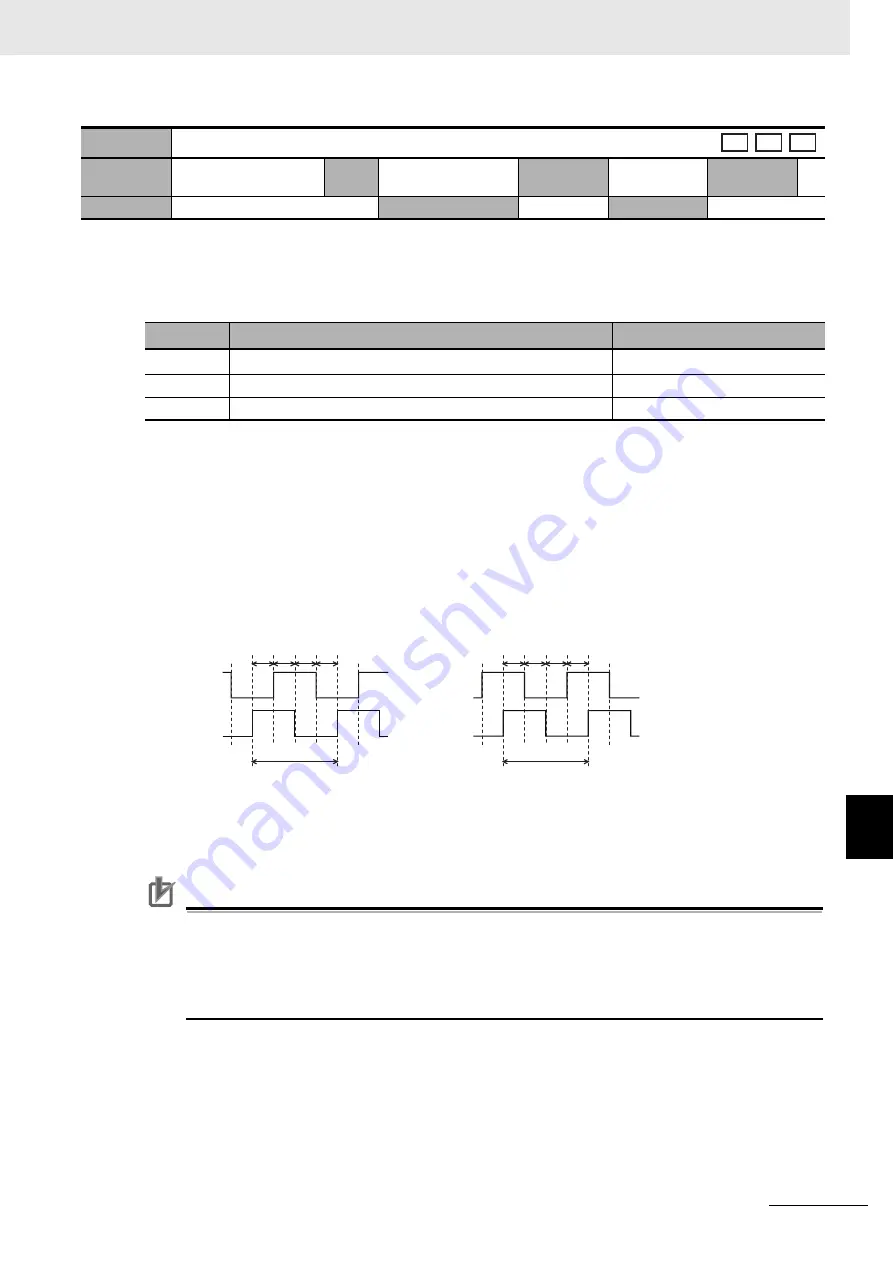
EXA
EXB
t11 t12 t13 t14
t2
t11 to t14 > 0.25 μs
t2 > 1.0 μs
EXA
EXB
t11 t12 t13 t14
t2
t11 to t14 > 0.25 μs
t2 > 1.0 μs
EXB is 90° ahead of EXA.
Count-down direction
EXB is 90° behind EXA.
Count-up direction
Содержание R88D-KN01H-ECT-L
Страница 136: ...3 Specifications 3 60 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 190: ...4 System Design 4 54 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 208: ...5 EtherCAT Communications 5 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 226: ...6 Basic Control Functions 6 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 268: ...7 Applied Functions 7 42 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 276: ...8 Safety Function 8 8 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 616: ...Appendices A 170 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 617: ...Index 1 I G5 series Linear Motors Servo Drives With Built in EtherCAT Communications Index...
Страница 624: ......
Страница 625: ......







































































