



























4742-E P-27
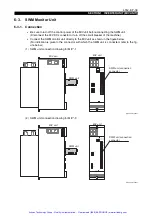
SECTION 1 INVERTER UNIT (MIV UNIT)
25
Command
error
Contents of the positioning commands are incorrect.
Error in set/mode/coordinate system change
XXXXYYYY
XXXX
0010[Hex]: Positioning mode
Point number over
0011[Hex]: Positioning mode
Negative command value
0012[Hex]: Positioning mode
Command value
> 1 turn of control objective
0013[Hex]: Positioning mode
Positioning point table not transmitted
0014[Hex]: Positioning mode
Not rotary axis
0015[Hex]: Positioning mode
Command format is not point.
0016[Hex]: Positioning mode
Positioning sub mode error
0021[Hex]: Set changeover designation
Set number over
0022[Hex]: Mode
Undefined mode
0023[Hex]: Mode
Positioning/tool path mode conditions
0024[Hex]: Coordinate system
Coordinate system designation error
0030[Hex]: Undefined bit data of the servo link
A-buffer is turned ON.
0031[Hex]: Undefined bit data of the servo link
B-buffer is turned ON.
0040[Hex]: Mode was changed to AT mode although time
synchronization instruction has not been received.
YYYY = Error data
If XXXX is 0010 - 0016 [Hex], it indicates the positioning sub
mode.
0: Program mode
1: Search mode
2: Pulse handle mode
3: Teaching mode
Check the servo
data file.
Check the NC soft-
ware.
Change the MIV unit.
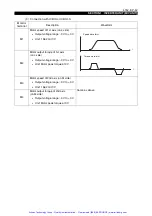
26
CON speed
over
An incremental value of position command (SRCOND) sent
from the NC to the inverter unit exceeded the allowable value.
XXXXXXXX = Specified CON velocity
2^-16 [pr/Tp] (Speed mode: [Su/Tc])
The following data indicates special cases.
1: An error occurred in preliminary check since the value is
too large.
2: The internal position command value
(SRCON) exceeded the absolute stroke value of the
encoder.
(Only for a linear axis)
Check the servo
data file.
Check the NC soft-
ware.
No.
Name
Description/Alarm Code
Corrective Action
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com





















































