





























NXP Semiconductors
KTFRDM34933EVBUG
FRDM-34933EVB evaluation board
KTFRDM34933EVBUG
All information provided in this document is subject to legal disclaimers.
© NXP B.V. 2017. All rights reserved.
User guide
Rev. 1.0 — 15 March 2017
21 / 39
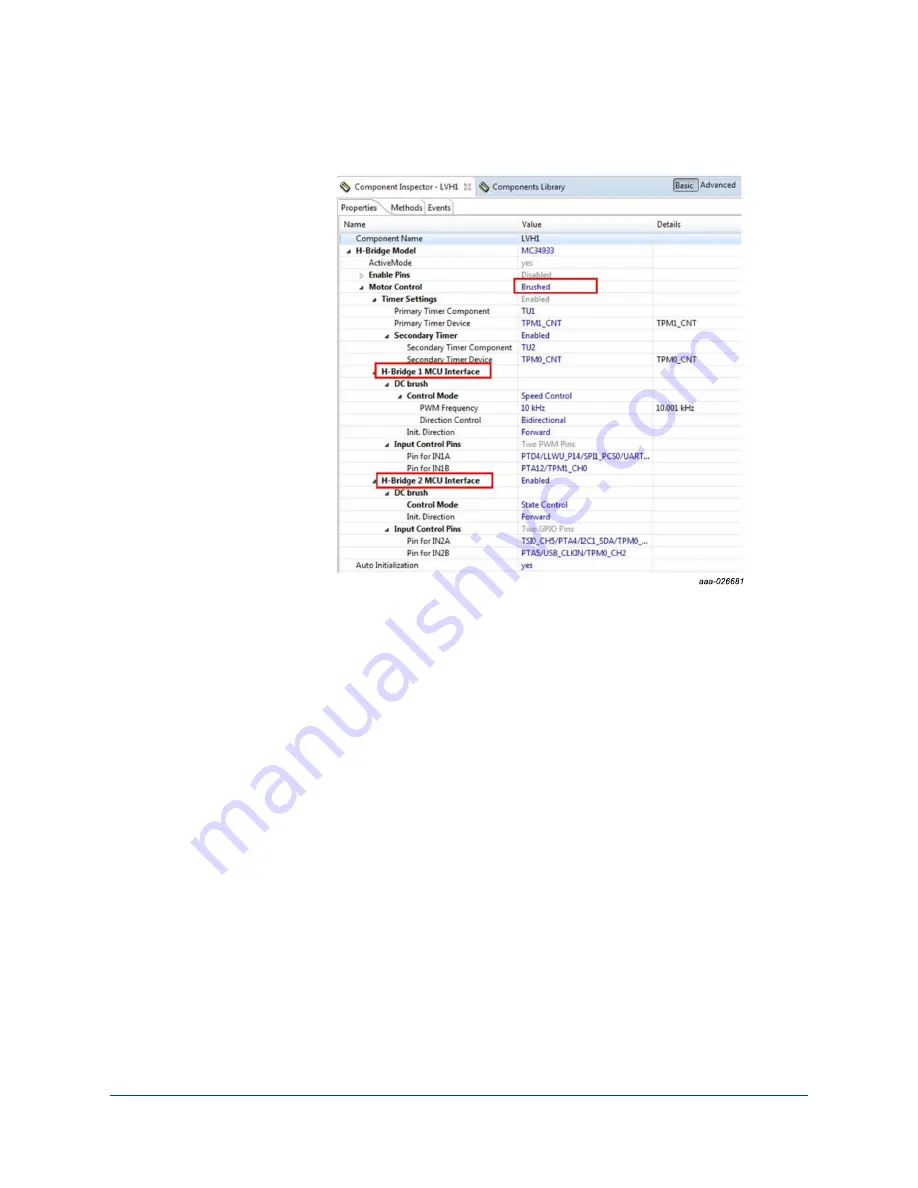
2. Set the Control Mode property. There are two ways to control the DC brushed motor:
•
Speed control - motor speed is controlled by your settings. The TimerUnit_LDD
component is used to generate the PWM signal. The PWM Frequency property
is visible in this mode only. If you set the Speed Control mode on both interfaces
(Interface 1 and Interface 2), the PWM Frequency property on Interface 2 sets
automatically to the same value as Interface 1 (because Interface 2 uses the same
timer).
•
State control - motor is controlled by GPIO pins (BitIO_LDD components). This
means you can switch the motor on or off without speed adjustments. The
advantage of this mode is that you do not need timer channels. If you set State
Control on both interfaces or you have only a single H-bridge model (one interface)
with State Control, the TimerUnit_LDD component is not required anymore by the
LVHBridge component and you can remove it from the project.
3. Set the PWM Frequency.
4. Set the Direction Control property.
The Direction Control property determines what direction the motor is allowed to move
in. Setting the property to Forward restricts the motor's movement in the forward
direction only. Setting the property to Reverse restricts movement in the reverse
direction only. A Bidirectional setting allows the motor to move in either direction. The
Bidirectional mode requires two timer channels. Forward or reverse requires only one
timer channel and one GPIO port. This setting is available only when Speed Control
mode is set in the Control Mode property.