


















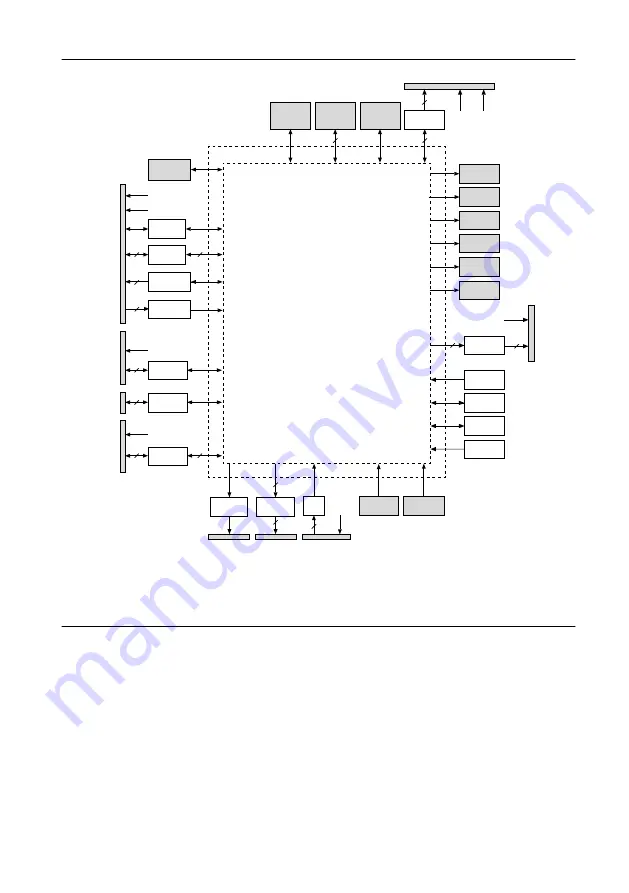
Figure 2.
NI roboRIO Hardware Block Diagram
CAN
Port
Xilinx Zynq-7020
Processor/FPGA
(LabVIEW RT)
USB
Device
Port
USB
Host
Ports
10/100
Ethernet
Port
Status LED
Comm LED
Radio LED
Mode LED
RSL LED
Power LED
+3.3 V
+5.0 V
16
16
2
4
UART
DIO
Analog Out
Analog In
myRIO
Expansion
Port (MXP)
User
Button
Reset
Button
PWM
Port
10
10
+6.0 V
PWM
SPI
SPI Port
+5.0 V
+3.3 V
7
7
2
RS-232
RS-232
Port
2
I
2
C
I
2
C
Port
2
+3.3 V
DIO
Port
DIO
10
10
+5.0 V
Watchdog
Nonvolatile
Memory
DDR3
Acceler-
ometer
RSL
RSL
Port
Relay
8
8
RELAY
Port
4
+5.0 V
AI
ANALOG IN
Port
Setting Up the NI roboRIO
Connecting to Power
The NI roboRIO requires an external power supply that meets the specifications in the
Power
Requirements
section of the
NI roboRIO Specifications
. The NI roboRIO filters and regulates
the supplied power and provides power for all of the I/O and user voltage. The NI roboRIO
has one layer of reverse-voltage protection.
Complete the following steps to connect a power supply to the chassis.
1.
Ensure that the power supply is turned off.
4
|
ni.com
|
NI roboRIO User Manual







































































