




















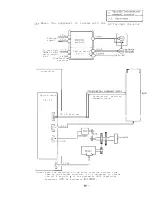









(vi) Rotate the motor from a
low speed to the maximum
speed and check that it does not generate noise both
in the forward rotation and reverse rotation.
2
Checking and
replacing parts
Adjusting and
2.9 placing motor built.
in encoder
(Note 1) If the printed circuit board is defective:
If the items for (ii) to (vi) cannot be
adjusted on the printed circuit board which is
mounted
the motor,
replace the board with a
new one and try to adjust the same items.
(Note 2) If the gap between the sensor in the motor and
the detection gear
is incorrect:
By referencing Section 4.2, replace the set of
sensor and printed circuit board with new ones
and try to readjust the items (ii) to
again.
76
Содержание FREQROL-SF
Страница 100: ... 3 Display lamps See Appendix 8 2 4 Check terminals See Appendix g 3 95 ...
Страница 101: ......
Страница 102: ......
Страница 103: ......
Страница 104: ......
Страница 105: ......
Страница 106: ......
Страница 107: ......
Страница 108: ......
Страница 109: ......
Страница 110: ......
Страница 111: ......
Страница 128: ......
Страница 129: ......
Страница 130: ......
Страница 131: ......
Страница 132: ......
Страница 133: ......
Страница 134: ......
Страница 135: ......
Страница 136: ......
Страница 137: ......
Страница 138: ......
Страница 139: ......
Страница 140: ......
Страница 141: ......
Страница 142: ......
Страница 143: ......
Страница 144: ......
Страница 145: ......
Страница 146: ......
Страница 147: ......
Страница 148: ......
Страница 149: ......
Страница 168: ...I J No Common Signal description waveform Example of waveform Orientation stop state 13 5 16 5V 9 1lV 1 300ILsec 163 ...







































































