





























2Robot arm
Standard specifications
2-6
2 Robot arm
2.1 Standard specifications
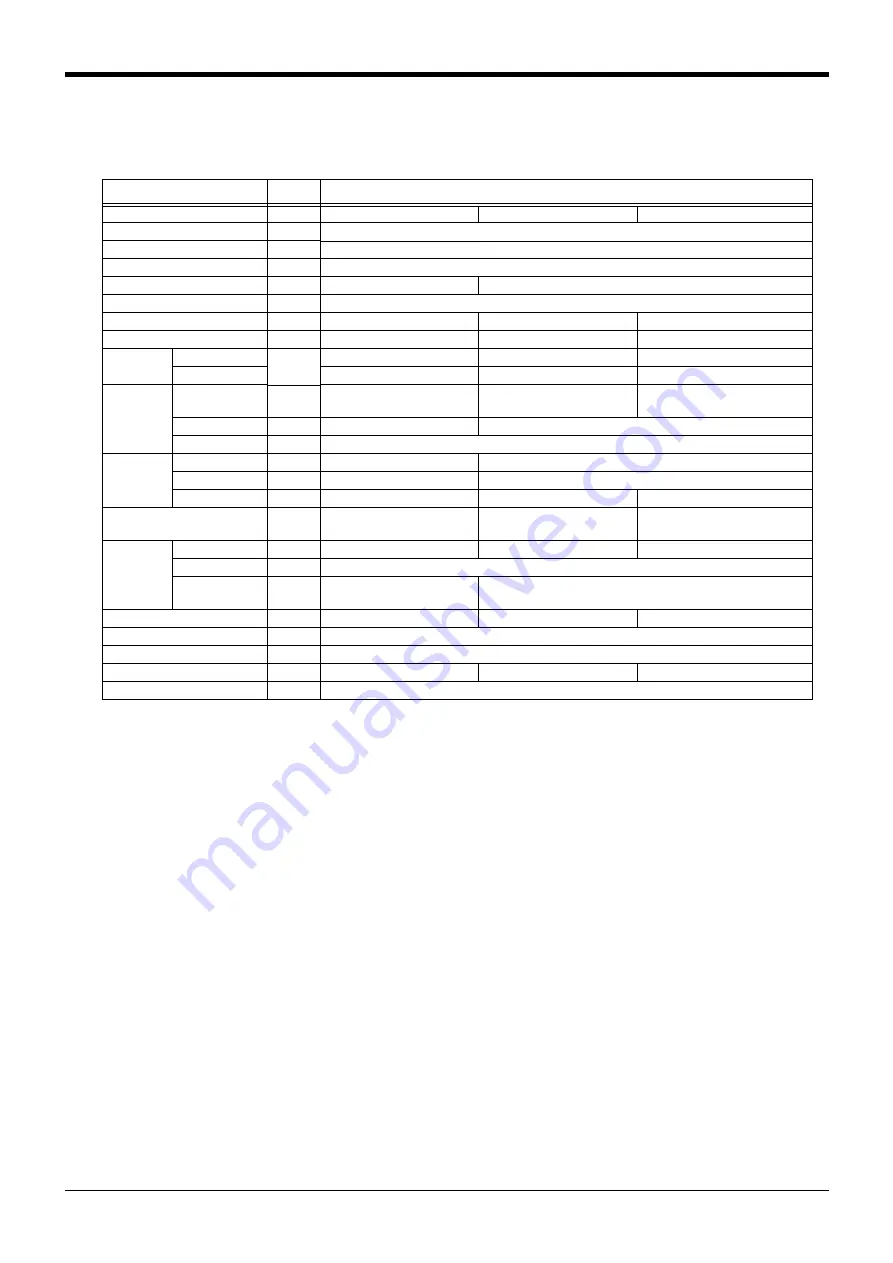
Table 2-1 : Standard specifications of robot
Item
Unit
Specifications
Type
RP-1ADH
PR-3ADH
RP-5ADH
Degree of freedom of motion
4-axis
Installation posture
On floor
Encoder/Drive system
Absolute encoder/AC servo
Motor capacity
W
100 (All axis)
200 (J1,J2,J3 axis), 100(J4 axis)
Brake
With brakes (All axes)
Maximum load
Note1)
Note1) It is necessary to set the acceleration/deacceleration speed appropriately according to the installing load mass. Refer to
"2.2 Definition of specifications"
for detail.
kg
1.0
3.0
5.0
Rated load
kg
0.5
1.0
2.0
Arm length No.1 Arm
mm
100
140
200
No.2 Arm
140
200
260
Motion range Width x depth
mm
150 x 105
(A6 size)
210 x 148
(A5 size)
297 x 210
(A4 size)
Vertical
mm
30
50
Rotation
Degree
±200
Maximum
velocity
J1, J2
Degree/s
480
432
J3
mm/s
800
960
J4
Degree/s
3000
1330
1230
Tolerable wrist
moment of inertia
kg ・ m
2
3.10 x 10
-4
1.60 x 10
-3
3.20 x 10
-3
Position
repeatability
X, Y direction
mm
±0.005
±0.008
±0.01
Z direction
mm
±0.01
Wrist rotation
direction
Degree
±0.02
±0.03
Mass
kg
Apporox. 12
Apporox. 24
Apporox. 25
Tool wiring
Input 8 point/ Output 8 point
Tool pneumatic pipes
None
Cleanliness
-
-
-
Paint color
color: Light gray (Equivalent to Munsell: 7.65Y7.6/0.73)
Содержание CR1DA-7A1-S15
Страница 2: ......
Страница 118: ......
Страница 119: ......
Страница 120: ......
Страница 121: ......
Страница 122: ......
Страница 123: ......
Страница 124: ......
Страница 125: ......
Страница 126: ......
Страница 127: ......
Страница 128: ......
Страница 129: ......
Страница 130: ......
Страница 131: ......
Страница 132: ......
Страница 133: ......
Страница 134: ......
Страница 135: ......
Страница 136: ......
Страница 137: ......
Страница 138: ......
Страница 139: ......
Страница 140: ......
Страница 141: ......
Страница 142: ......
Страница 143: ......







































































