5. Programming the robot to use
MiRCharge 24V Operating guide (en) 10/2019 - v.2.0 ©Copyright 2019: Mobile Industrial Robots A/S.
27
6.
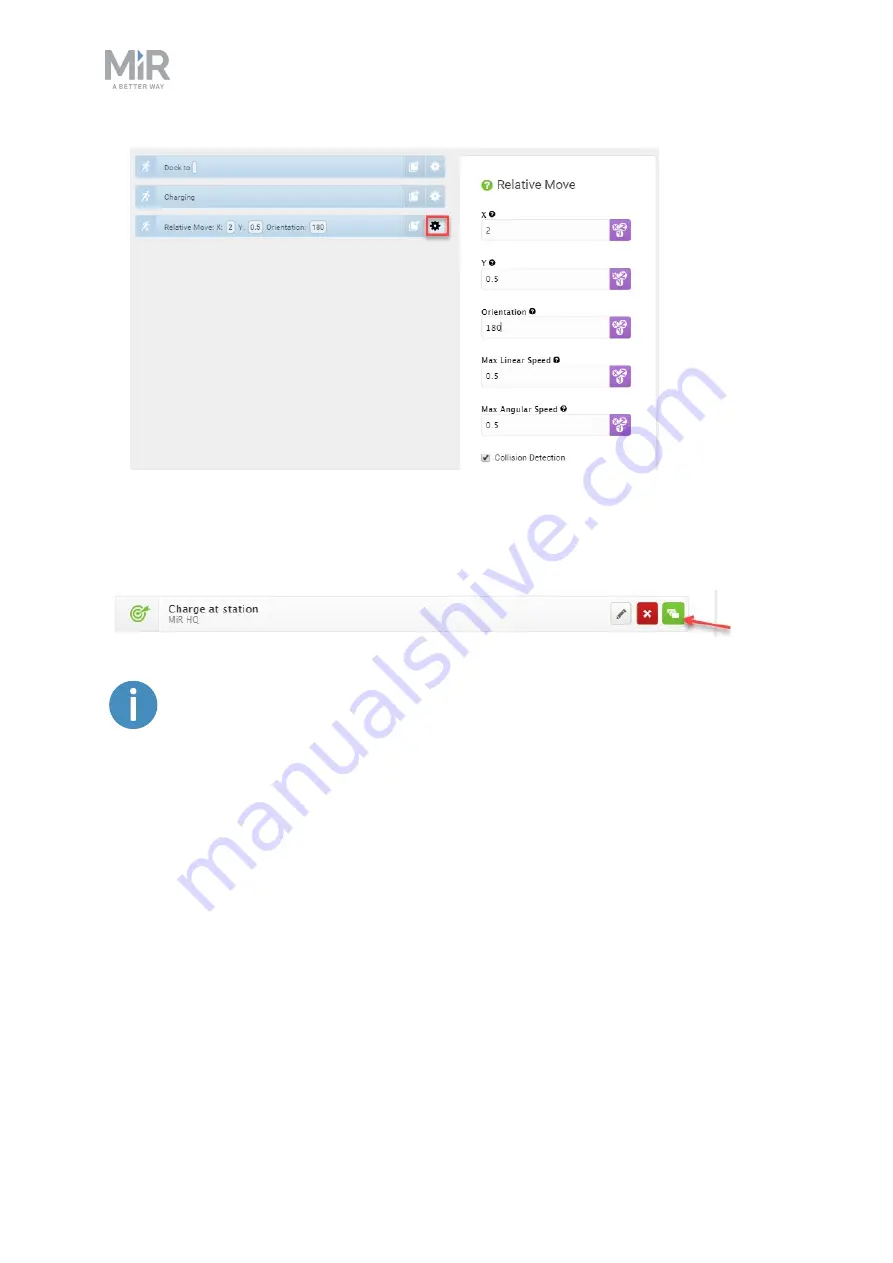
The mission is complete. Select
Save
to save the mission.
The mission is now visible in the missions list and ready to add to the missions queue.
The mission can also be inserted in other missions. In that case the
Relative
move
action is unnecessary.
5.3. Insert a charging action into a larger mission
Usually, charging actions are part of larger missions where the battery level is regularly
checked throughout the mission. The missions can be created in a number of ways, but must
include an
If
action that regularly checks the battery level and sends the robot to a charging
station when the battery level falls below a defined percentage.
In the following example, the whole mission is embedded in a Loop action that ensures that
the mission starts over every time the last action is carried out. Inside the Loop action, there
is an
If
action which checks the battery level every time the actions under
True
or
False
are
completed.