





























Operating Manual
- Page 22 -
5.1
F1 Menu
Below is a list of Point Types, which are found under the
Enter or F1
key (
F1 Menu
):
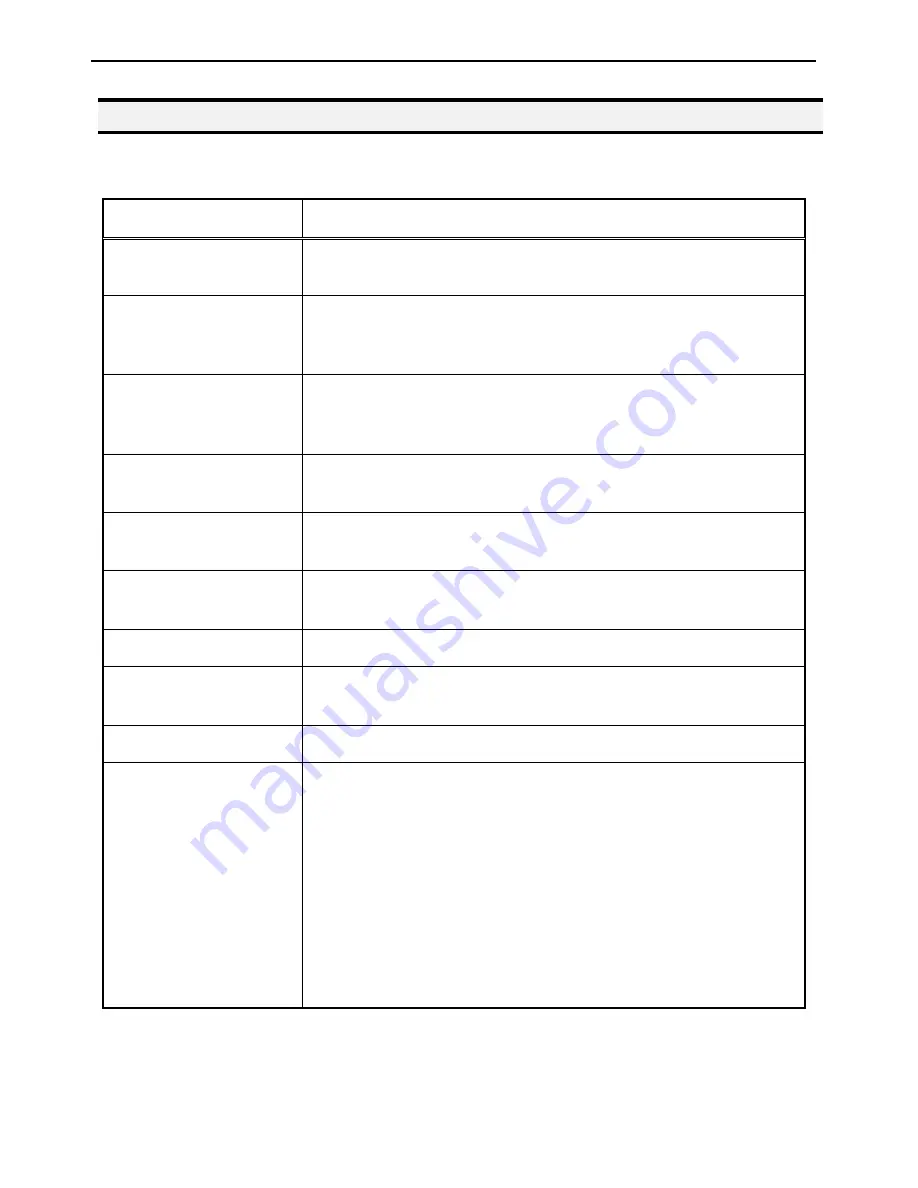
Function Description
Dispense Dot
Registers the current XYZ location as a Dispense point for dot
dispensing.
Line Start
Registers the current XYZ location as a Line Start point for line
dispensing.
This function is also includes DISPENSE ON function.
Line Passing
Registers the current XYZ location as a Line Passing point. This is
a location on the line where the tip changes direction, such as at
the corner on a rectangle.
Circle
Registers a circle with the circle center at the current XYZ
location. The display will prompt the user for the circle diameter.
Arc Point
Registers the current XYZ location as an Arc point. Arc points are
used to dispense material in an arc or circle.
Line End
Registers the current XYZ location as a Line End point.
This function also includes DISPENSE OFF function.
End Program
Registers the current memory address as the end of the program.
Dispense On / Off
Registers an instruction which turns the dispenser on or off at the
current XYZ location.
GOTO Address
Causes the program to jump to the specified memory address.
Step & Repeat
Registers an instruction that will re-run a selected group of
memory addresses, stepping by a user-defined distance in the X or
Y-axis after each copy. The matrix of parts is defined by specifying
the number of rows, the number of columns, the X offset and the Y
offset.
Step & Repeat
X
indicates that the robot will give priority to the
X-axis, running the parts along the X-axis first.
Step & Repeat
Y
indicates that the robot will give priority to the Y-
axis, running the parts along the Y-axis first.
Содержание EQ RB20 500D
Страница 1: ...Operation Manual Equipment Operation Manual Loctite EQ RB20 500D Dual Robot Part Number 2112252 ...
Страница 5: ...Operating Manual Page 5 SECTION 1 Introduction ...
Страница 8: ...Operating Manual Page 8 SECTION 2 Setup ...
Страница 10: ...Operating Manual Page 10 SECTION 3 Tour of Robot ...
Страница 12: ...Operating Manual Page 12 SECTION 4 Tour of Teach Pendant ...
Страница 21: ...Operating Manual Page 21 SECTION 5 MENU Introduction ...
Страница 30: ...Operating Manual Page 30 SECTION 6 Programming ...
Страница 39: ...Operating Manual Page 39 SECTION 7 Function Reference ...
Страница 98: ...Operating Manual Page 98 SECTION 8 Sample Programs ...
Страница 107: ...Operating Manual Page 107 SECTION 9 Software Upgrade ...
Страница 109: ...Operating Manual Page 109 SECTION 10 Error Messages and Specifications ...
Страница 118: ...Operating Manual Page 118 10 4 Machine Dimensions Unit millimeters mm A Dual Benchtop RB20 500D Robot ...
Страница 119: ...Operating Manual Page 119 SECTION 11 Maintenance Accessories Spare Parts ...
Страница 124: ...Operating Manual Page 124 SECTION 12 Equipment Warranty ...





















































