





























57
User
Manual
for
ELD2
Servo
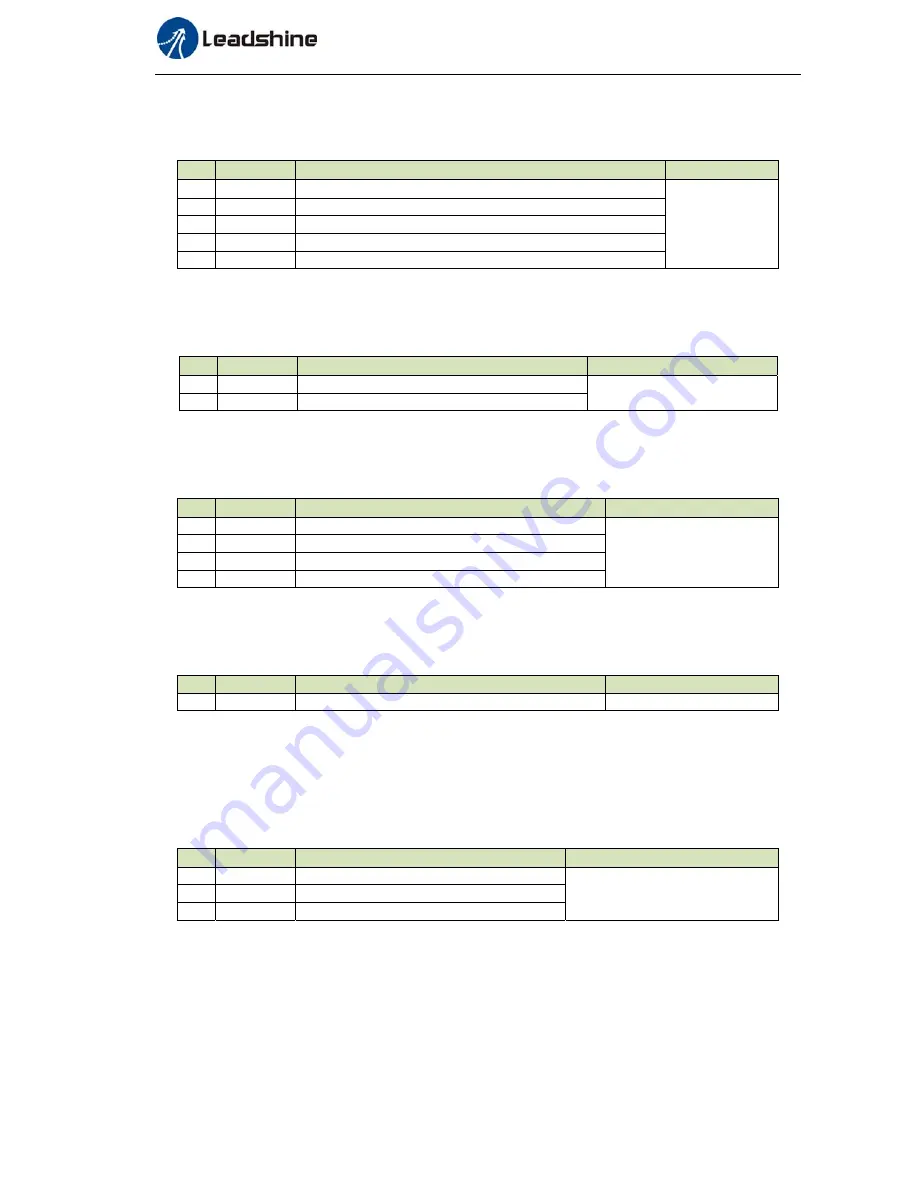
multiplying factor and applies the result to the position control section as the positional command. By using
this function, desired motor rotations or movement distance per unit input command pulse can be set.
Table
7.9
Parameter
Setup
of
Electronic
Gear
Ratio
No
Parameter
Name
Setup
method
1
PA_009
First command frequency double molecular
Please refer to
chapter 4
2
PA_010
Command frequency double denominator
3
PA_500
The second command divide double frequency molecular
4
PA_501
The third command divide double frequency molecular
5
PA_502
The fourth command divide double frequency molecular
3. Position command filter
To make the positional command divided or multiplied by the electronic gear smooth, set the command
filter.
Table
7.10
Parameter
Setup
of
Position
Command
Filter
No
Parameter
Name
Setup
method
1 PA_222 Positional
command
smoothing
filter
Please refer to chapter 4
2
PA_223
Positional command FIR filter
4. Motor encoder pulse output
The information on the amount of movement can be sent to the host controller in the form of A and B phase
pulses from the servo driver.
Table
7.11
Parameter
Setup
of
Driver
Encoder
Pulse
Output
No
Parameter
Name
Setup
method
1
PA_011
Encoder pulse output molecular
Please refer to chapter 4
2
PA_012
Pulse output logic reverse
3
PA_503
Pulse output divide frequency denominator
4 PA_533 Pulse
regeneration
output
boundary
set
5. Deviation Counter clear
The deviation counter clear input (CL) clears the counts of positional deviation counter at the position
control to 0.
Table
7.12
Parameter
Setup
of
Deviation
Counter
Clear
No
parameter
name
Setup
method
1
PA_517
Counter clear input mode
Please refer to chapter 4
6. Position complete output (INP)
The completion of positioning can be verified by the positioning complete output (INP).When the absolute
value of the positional deviation counter at the position control is equal to or below the positioning
complete
Range by the parameter, the output is ON. Presence and absence of positional command can be specified as
one of judgment conditions.
Table
7.13
Related
Parameter
Setup
of
Position
Complete
Output
No
Parameter
Name
Setup
method
1 PA_431 Position
complete
range
Please refer to chapter 4
2
PA_432
Position complete output setup
3
PA_433
INP hold time
And the output port should be assigned for “INP”, for details of these parameters, refer to PA_410 – PA415.
7. Command pulse prohibit (INH)
The command pulse input counting process can be forcibly terminated by using the command pulse inhibit
input signal (INH).When INH input is ON ,the servo driver ignores the command pulse ,disabling pulse
counting function.
Table
7.14
Related
Parameter
Setup
of
Command
Pulse
Prohibit







































































