



























A
A
C
C
S
S
6
6
0
0
6
6
D
D
i
i
g
g
i
i
t
t
a
a
l
l
A
A
C
C
S
S
e
e
r
r
v
v
o
o
d
d
r
r
i
i
v
v
e
e
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369
30
Website: www.leadshine.com
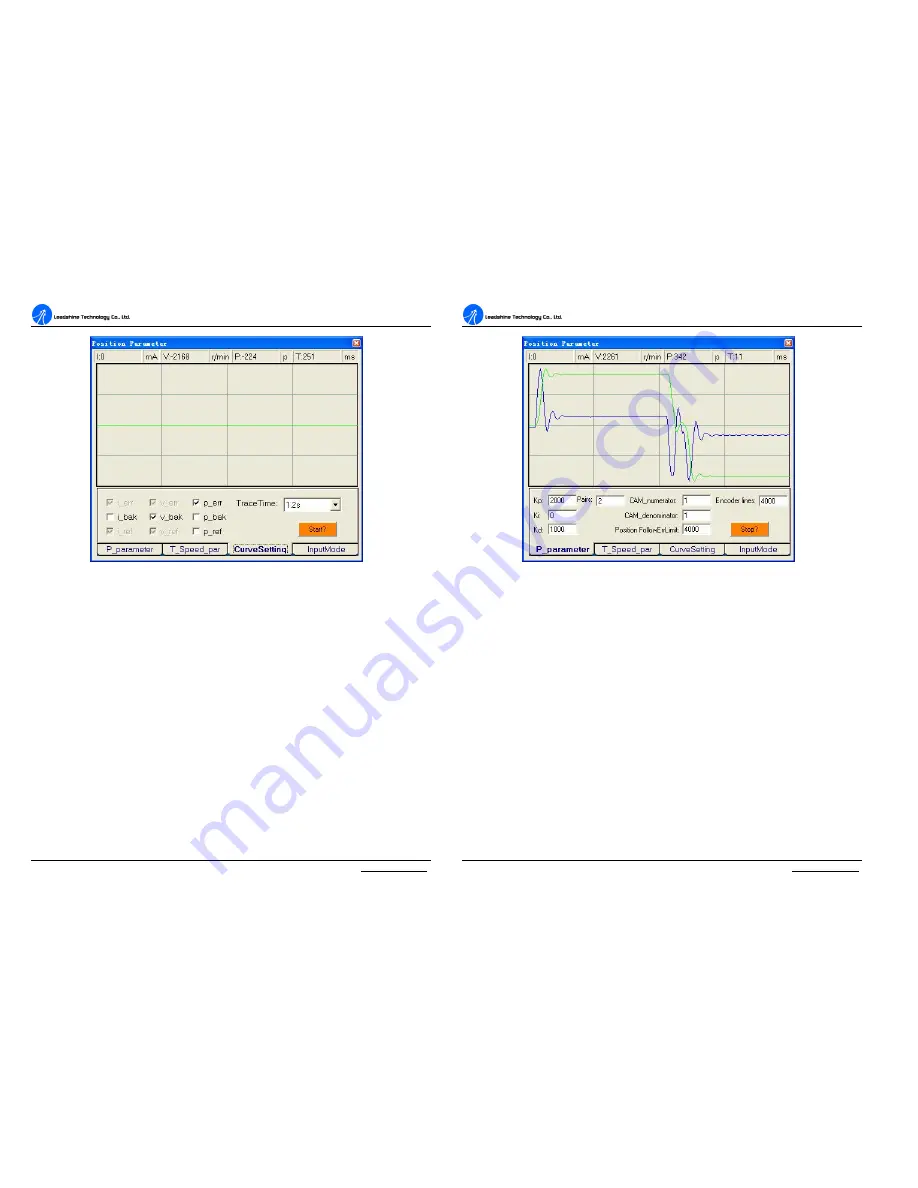
Figure 32: Digital Scope settings for the tuning
As mentioned above, the ACS606 adopts position around current (torque) mode, and
when tuning position around the current loop, a high derivative gain may be
necessary on top of both proportional and integral gains. Here, we set Kp=2000,
Ki=0, Kd=1000 first, and the self-test result is shown in Figure 33.
A
A
C
C
S
S
6
6
0
0
6
6
D
D
i
i
g
g
i
i
t
t
a
a
l
l
A
A
C
C
S
S
e
e
r
r
v
v
o
o
d
d
r
r
i
i
v
v
e
e
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369
31
Website: www.leadshine.com
Figure 33: Position following error curve and velocity curve (Kp=2000, Ki=0 and Kd=1000)
It
’
s very easy to see from the velocity curve (Green line) that the system is under
damped. This will cause system oscillating beyond either side of its target, so it must
be damped. Figure 26 shows the result after increasing Kd to 3500. In the Figure 34,
the oscillation is much smaller than that of Figure 33. You can get even smaller
oscillation when increasing Kd to 7000. See Figure 35.