





























Hardware Manual for the DMC5400 Motion Controller
Tel: +086 0755-26434369 Email: [email protected] Web Site: www.leadshine.com
Page: 20/36
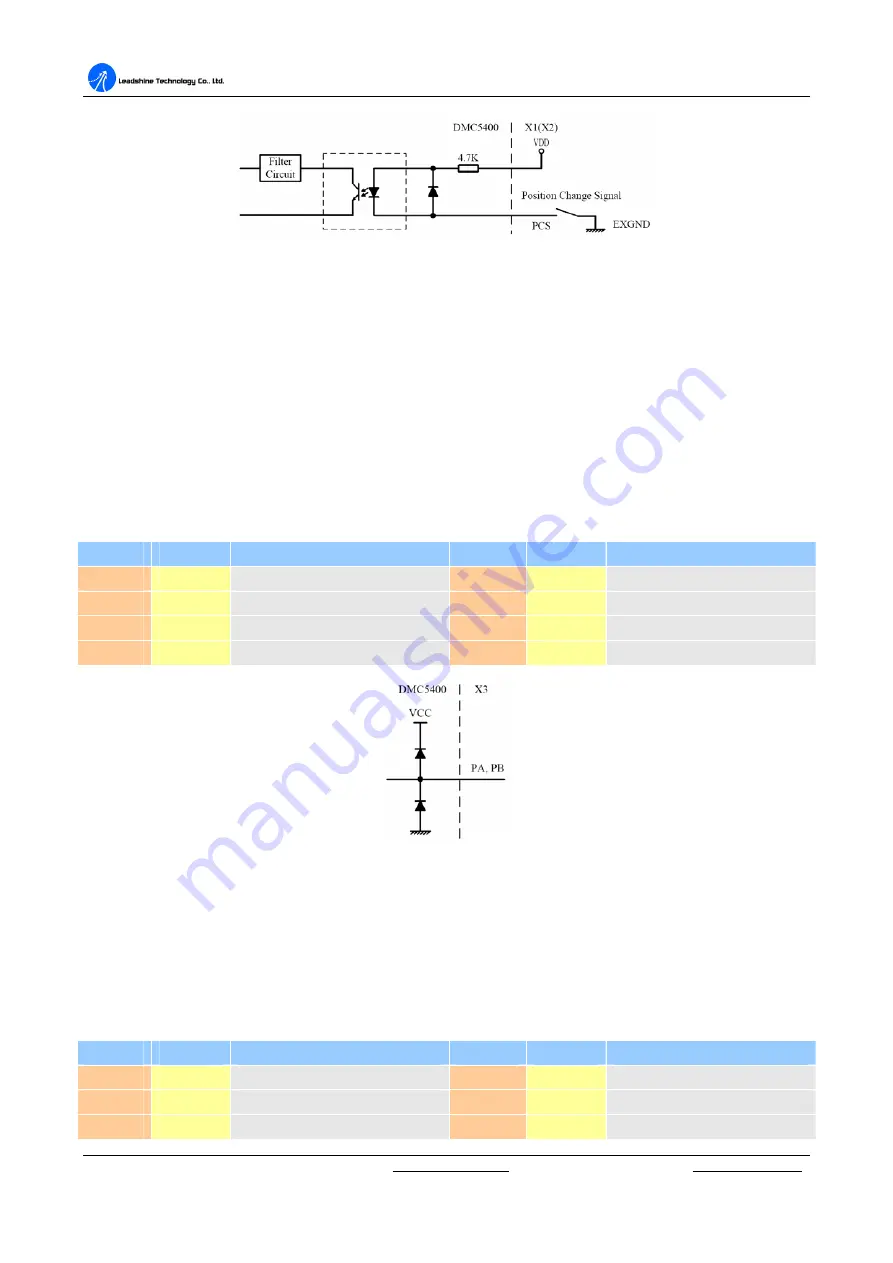
Figure 4.11: PCS signal interface circuit
4.11 Pulser Input Signals PA and PB
The DMC5400 can accept the input signals from pulser or JOG device signals through connector X3. The
behavior of pulser or JOG device is as an encoder. The signals are usually used to generate the position
information which guides the motor to follow. The interface circuits are shown as Figure 4.12.
The X3 contains two +5V power supplies for pulser, if the signal voltage of pulser is not +5V or if the pulser is
distantly placed, it is recommended to put an optocoupler or line driver in between. Also, +5V and GND power
lines of X3 are direct from the PCI bus. Please carefully use these signals because they are not isolated.
Table 4-13: PA and PB pins
X3 Pin
Signal
Description (Axis)
X3 Pin
Signal
Description (Axis)
2
PA
Phase A Signal, Axis0
8
PA
Phase A Signal, Axis2
3
PB
Phase B Signal, Axis0
9
PB
Phase B Signal, Axis2
4
PA
Phase A Signal, Axis1
10
PA
Phase A Signal, Axis3
5
PB
Phase B Signal, Axis1
11
PB
Phase B Signal, Axis3
Figure 4.12: PA and PB signals interface circuit
4.12 Position Latch Signal LTC
The DMC5400 provides 4 position latch inputs, which can trigger the DMC5400 to capture the counter values. It
gives a precise position determination. The following table lists the relative signal name, pin number, and the axis
number.
Table 4-13: LTC pins
X1 Pin
Signal
Description (Axis)
X2 Pin
Signal
Description (Axis)
41
LTC0
Position Latch Signal, Axis0
21
LTC1
Position Latch Signal, Axis1
46
LTC2
Position Latch Signal, Axis2
32
LTC3
Position Latch Signal, Axis3







































































