


















MD24 / MD28
– Hardware Description
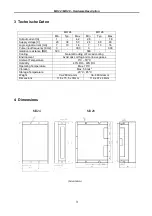
4
5 Pin Assignment
5.1 P1 - Control-Signals
Phoenix 6-pin.
Pin
Signal
Description
1
PUL+(+5V)
Pulse signal: In single pulse (pulse/direction) mode, this input represents
pulse signal, effective for each rising or falling edge (set by inside jumper
J1); 4-5V when PUL-HIGH, 0-0.5V when PUL-LOW. In double pulse mode
(pulse/pulse) , this input represents clockwise (CW) pulse, effective for high
level or low level (set by inside jumper J1). For reliable response, pulse
width should be longer than 1.5µs. Series connect resistors for
current-limiting when +12V or +24V used.
2
PUL-(PUL)
3
DIR+(+5V)
DIR signal: In single-pulse mode, this signal has low/high voltage levels,
representing two directions of motor rotation; in double-pulse mode (set by
inside jumper J2), this signal is counter-clock (CCW) pulse, effective for
high level or low level (set by inside jumper J1). For reliable motion
response, DIR signal should be ahead of PUL signal by 5µs at least. 4-5V
when DIR-HIGH, 0-0.5V when DIR-LOW.
4
DIR-(DIR)
5
ENA+(+5V)
Enable signal: This signal is used for enabling/disabling the driver. High
level (NPN control signal, PNP and Differential control signals are on the
contrary, namely Low level for enabling.) for enabling the driver and low
level for disabling the driver.
Usually left
UNCONNECTED (ENABLED)
6
ENA-(ENA)
5.2 P2 - Motor / Power-supply
Phoenix 6-pin.
Pin
Signal
Description
1
GND
DC power ground
2
+V
DC power supply (see techn. data)
3
A+
Motor-Phase A
4
A-
5
B+
Motor-Phase B
6
B-







































































