MANUAL
• Subject to alteration! Version: June 2015
ipf electronic gmbh
• Rosmarter Allee 14 • 58762 Altena
│
Tel +49 2351 9365-0 • Fax +49 2351 9365-19
│
3
2 Functional Principal
The distance measured is based on the triangulation principle. The emitted laser beam falls on the object as a small
light spot and will be reflected diffusely. The position of the received light spot on the receiver (a diode line) defines
the receiving angle. This angle corresponds to the distance and is the base for the internal calculations.
A distance change close to the sensor effects a large change in angle; the same distance change at the end of the
measuring range has a much smaller effect to the angle. This non-linearity feature is linearized by the microcontroller.
The analog output signal is linear to the distance..
The sensor adapts automatically to different object colors by varying the emitting laser intensity and
optimizing the exposure time. The result is a sensor that is nearly independent on different reflections (different colors,
shiny surfaces, dark objects). The sensor reaches its highest accuracy if the object reflects diffusely.
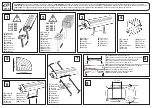
3 Mounting Instructions
•
For a proper mounting, the mounting surface has to be flat. Be aware of the max. tightening torque.
•
In case of EMC, the sensor has to be grounded and a shielded cable has to be used.
•
The 90° rotating connecter allows wiring the sensor from the bottom side or from the rear.
•
The max. accuracy will be reached >15 minutes after power on.