





























PISO-CANFD series CAN FD card User Manual (version 1.0.0)
Page: 29
Copyright © 2021 ICP DAS Co., Ltd. All Rights Reserved.
E-mail: [email protected]
1
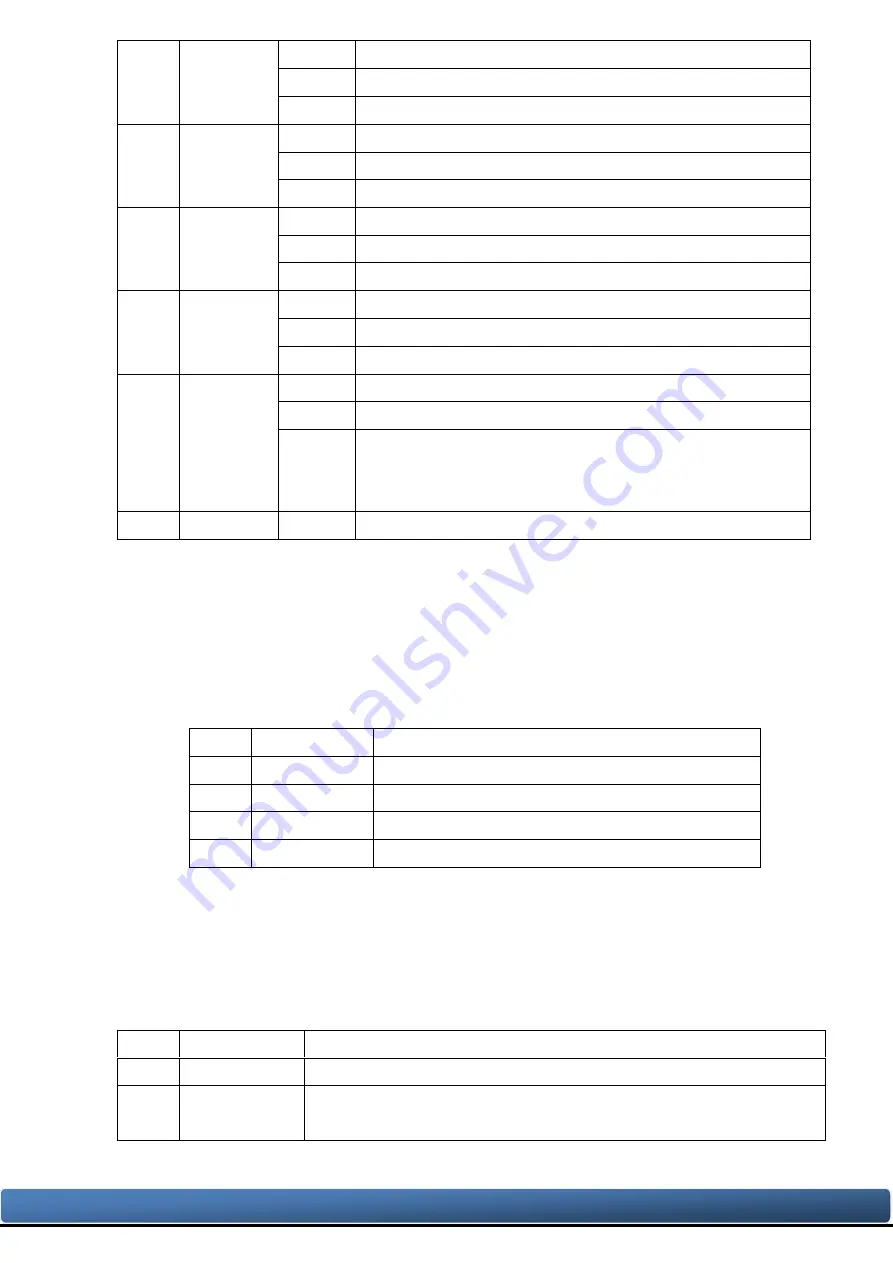
RXWARN
Receiver in Error Warning State bit
0
Receiver not in Error Warning State (REC <= 95)
1
Receiver in Error Warning State (128 > REC > 95)
2
TXWARN:
Transmitter in Error Warning State bit
0
Transmitter not in Error Warning State (TEC <= 95)
1
Transmitter in Error Warning State (128 > TEC > 95)
3
RXBP:
Receiver in Error Passive State bit
0
Receiver not in Error Passive State (REC <= 127)
1
Receiver in Error Passive State (REC > 127)
4
TXBP:
Transmitter in Error Passive State bit
0
Transmitter in Error Passive State (TEC <= 127)
1
Transmitter in Error Passive State (TEC > 127)
5
TXBO:
Transmitter in Bus Off State bit
0
Transmitter not in Bus Off State
1
Transmitter in Bus Off State (TEC > 255).
In Configuration mode, TXBO is set, since the CAN
module is not on the bus
15-6
-
-
reserved
<4>
“
TxEc
”
:
Transmit error counter value of the CAN controller
<5>
“
RxEc
”
:
Receiver error counter value of the CAN controller
<6>
“BusDiag0” :
BusDiag0 contains separate error counters for receive/transmit and for
nominal/data bit rates. They are simply incremented by one on every
error.
Bit
Symbol
Description
7-0
NRERRCNT Nominal Bit Rate Receive Error Counter bits
15-8
NTERRCNT Nominal Bit Rate Transmit Error Counter bits
23-16 DRERRCNT: Data Bit Rate Receive Error Counter bits
31-24 DTERRCNT: Data Bit Rate Transmit Error Counter bits
<7>
“BusDiag1” :
BusDiag1 keeps track of the kind of error that occurred since the last
clearing of the register. The register also contains the error-free
message counter. The flags and the counter are cleared after reading.
Bit
Symbol
Description
15-0
EFMSGCNT Error Free Message Counter bits
16
NBIT0ERR:
During the transmission of a message (or acknowledge bit, or
active error flag, or overload flag), the device wanted to send a