















I-7565M-FD USB to CAN/CAN FD converter User Manual (version 1.0.0)
Page: 82
Copyright © 2019 ICP DAS Co., Ltd. All Rights Reserved. E-mail: [email protected]
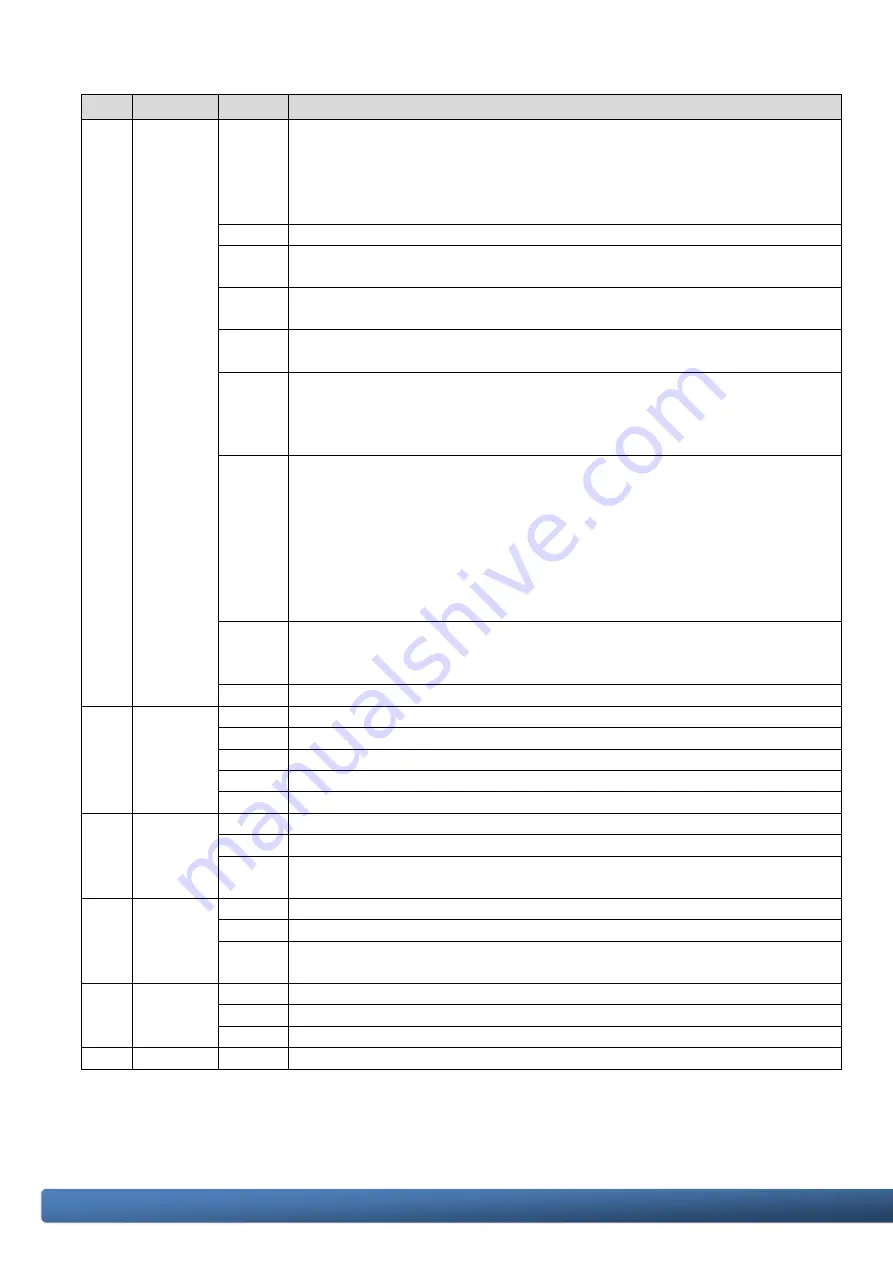
7.3. CAN Status Register
Bit Symbol Value
Description
2:0
LEC
Last error code
These bits indicate the type of the last error to occur on the CAN
bus. This bit field will be cleared when a message has been
transferred without error. The bits in this bit field will be set upon a
read access.
0x0
No error.
0x1
Stuff error
: More than 5 equal bits in a sequence have occurred in
a part of a received message where this is not allowed.
0x2
Form error
: A fixed format part of a received frame has the wrong
format.
0x3
AckError
: The message transmitted by the M_CAN was not
acknowledged by another node.
0x4
Bit1Error
: During the transmission of a message (with the
exception of the arbitration field), the device wanted to send a
recessive level (bit of logical value 1), but the monitored bus value
was dominant.
0x5
Bit0Error
: During the transmission of a message (or acknowledge
bit, or active error flag, or overload flag), the device wanted to send
a dominant level (data or identifier bit logical value 0), but the
monitored bus value was recessive. During Bus_Off recovery this
status is set each time a sequence of 11 recessive bits has been
monitored. This enables the CPU to monitor the proceeding of the
Bus_Off recovery sequence (indicating the bus is not stuck at
dominant or continuously disturbed).
0x6
CRCError
: The CRC check sum of a received message was
incorrect. The CRC of an incoming message does not match with
the CRC calculated from the received data.
0x7
Unused
: No CAN Bus event was detected
4:3
ACT
Activity. This register monitors the CAN communication state.
0x0
Synchronizing
– node is synchronizing on CAN communication.
0x1
Idle
– node is neither receiver nor transmitter.
0x2
Receiver
– node is operating as receiver
0x3
Transmitter
– node is operating as transmitter.
5
EP
Error passive
0
The CAN controller is in the error active state.
1
The CAN controller is in the error passive state as defined in the
CAN 2.0 specification.
6
EW
Warning status
0
Both error counters are below the Error_Warning limit of 96
1
At least one of error counter has reached the Error_Warning limit of
96
7
BOFF
Busoff status
0
The CAN module is not in busoff state.
1
The CAN controller is in busoff state.
31:8
-
-
Reserved







































































