



























37
11. Timing Chart
[1] Power Input
→
Operation preparation end
1) Release the emergency stop status or enable the motor driving power supply.
2) Supply 24VDC for the I/O.
3) Supply 24VDC for the controller.
4) Input the Servo-motor ON signal from the PLC side *3.
5) Input the backward end movement command and signals at
fi
rst from the PLC side (home
return operation).
Mechanism End
Home Position
1.6sec or less
*2
Home return
*1
6ms or less
Forward End Position
(Single Solenoid System)
Backward End Position
(Double Solenoid System)
Safety Circuit Condition
I/O Power 24VDC Supply
Controller Power 24VDC Supply
LED for STATUS Indication
Servo-motor ON Signal Input
*3
(SON)
(Backward End) Movement Signal (1, 2) Input
(ST0)
Actuator Operation
Home Return Completion Output
(HEND)
Backward End Position Detection Output
(LS0)
Backward Point Positioning Completion Output
(PE0)
*1. When the home return operation is set to “MANU” in the initial setting and the
fi
rst ST0 is turned ON, the
actuator is returned to the home position and the operation is started. When it is set to “AUTO”, the actuator is
returned to the home position automatically after the servo-motor ON is input.
The above are effective only when the actuator is incremental type (for the absolute type, the home return
operation is not required).
*2. The Servo-motor ON signal is input for the
fi
rst time after the power input, input the movement command after
the delay time of 1.6sec or more. In the second time or later, make the delay time of 60ms or more.
*3. When the Servo-motor Control is set to “Enable” in the initial setting, the servo-motor is turned ON by means
of inputting the SON signal. When it is set to “Disable” the servo-motor is turned ON automatically.
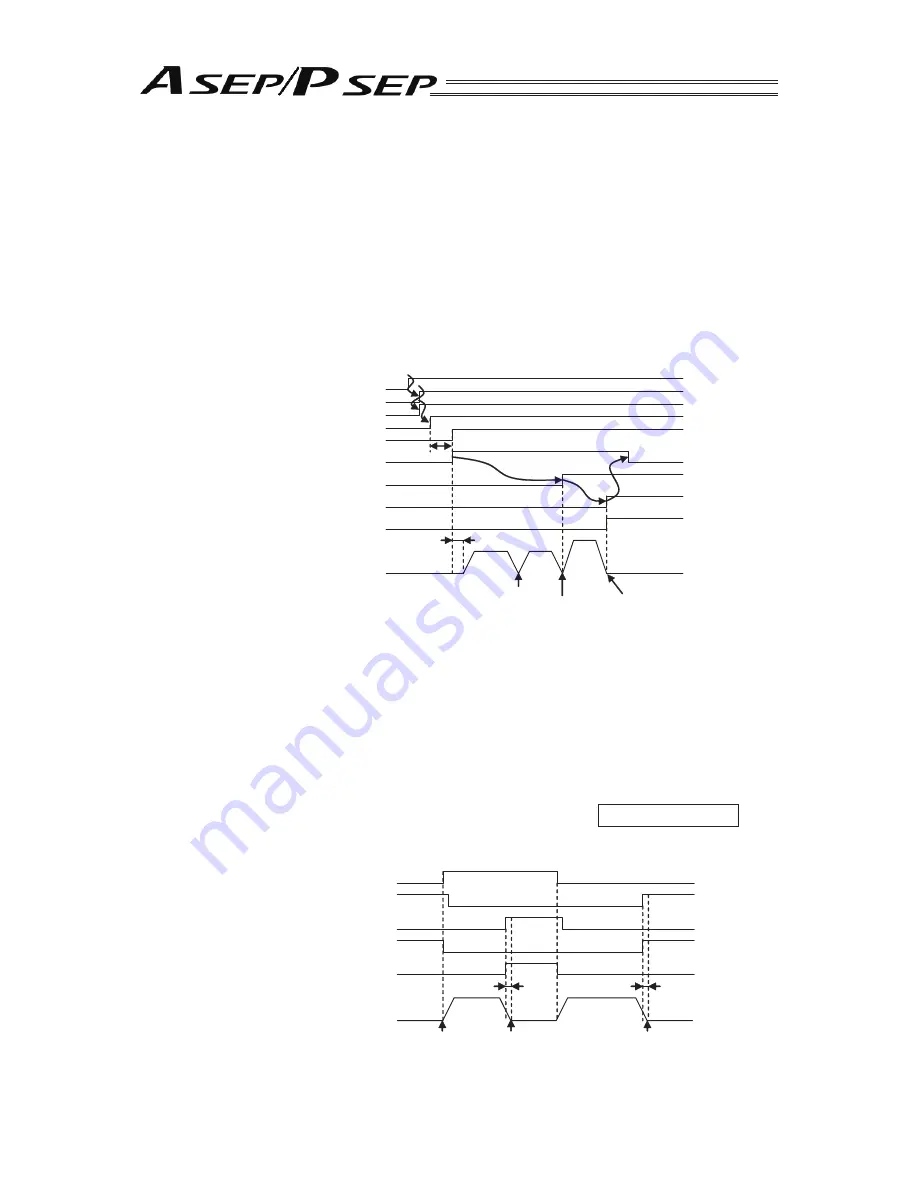
[2] Point-to-Point Movement (For Single Solenoid System) ••• PIO Pattern 0 to 2
When the ST0 is turned “ON”, the positioning to the backward end is performed and when the
ST0 is turned “OFF”, the positioning to the forward end is performed.
Backward End
Forward End
Backward End
Positioning Width
(Parameter No.1)
Positioning Width
Positioning Width
(Parameter No.1)
(Parameter No.1)
Positioning Width
(Parameter No.1)
Actuator Operation
Movement Signal
(ST0)
Backward End Position Detection Output
(LS0)
Forward End Position Detection Output
(LS1)
Backward Point Positioning Completion Output
(PE0)
Forward End Point Positioning Completion Output
(PE1)
Содержание ASEP
Страница 1: ...ASEP Controller PSEP Controller IAI America Inc Operation Manual Fourth Edition...
Страница 2: ......
Страница 4: ......
Страница 6: ......
Страница 20: ...14...







































































