




























36
6) Energy-Saving Function …
When it is set to “Enable”, the servo-motor is turned OFF automatically after
the positioning is completed and the speci
fi
ed time period passes.
(Because the holding current does not pass in the stop mode, the power
consumption can be saved).
The servo-motor is turned ON with the next movement command, and the
actuator movement is started.
• The movement speed is to be changed for the Operation Pattern (PIO Pattern) No.1, in addition to
position data, the position where the speed is changed and the velocity parameters are set.
Position Data
8) Changed Position
9) Changed Speed
Forward End Position
60.00
30.00
Backward End Position
40.00
30.00
7) Changed Position … The position where the velocity is changed in the course of moving to the forward
end or backward end, is set.
8) Changed Speed … The changed speed is set.
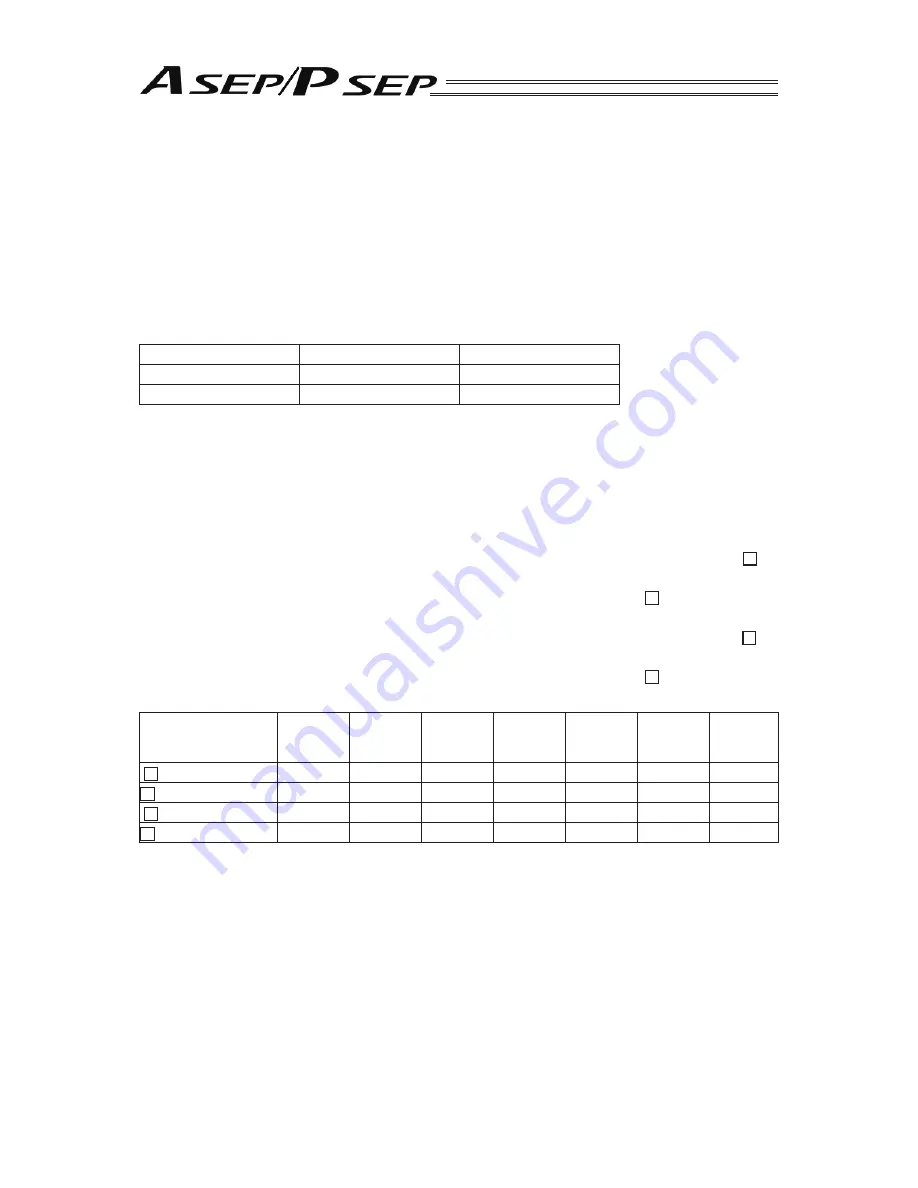
• When the position data is to be changed for the Operation Pattern (PIO Pattern) No. 2, in addition to
the position data items for the forward end and backward end, the position data items for the changed
forward end and changed backward end, are set.
• In the case that the CN1 is turned OFF, the position data for the forward end turns to be the data in 1
Forward End Position.
In the case of “ON”, the position data for the forward end are the data speci
fi
ed in “ 3 Forward End
Position”.
• In the case that the CN1 is turned OFF, the position data for the forward end turns to be the data in 2
Backward End Position.
In the case of “ON”, the position data for the forward end are the data speci
fi
ed in “ 4 Backward End
Position”.
Position Data
Position
Velocity
Acceleration Deceleration
Pressing
Force
Pressing
Width
Energy-
Saving
Function
1 Forward End Position
0.00
50.00
0.1
0.1
0
0
Effective
2 Backward End Position
200.00
50.00
0.1
0.1
70
1.00
Effective
3 Forward End Position
10.00
50.00
0.1
0.1
0
0
Effective
4 Backward End Position
100.00
50.00
0.1
0.1
60
1.00
Effective
[3]
Absolute Reset (This function is effective only when the controller and actuator are
the absolute type).
When the power to the machine is turned ON for the
fi
rst time, perform the Absolute Reset.
Procedure : After the power is turned ON, an absolute encoder error detection error occurs. Turn ON the
RES signal (IN2), reset the alarm on the alarm window displayed on the PC software, or touch
“RES” on the Alarm window in the touch panel teaching mode to remove the error. Then,
perform the home return operation (In the case that the Absolute Reset has been performed,
the home return window is not displayed).
Содержание ASEP
Страница 1: ...ASEP Controller PSEP Controller IAI America Inc Operation Manual Fourth Edition...
Страница 2: ......
Страница 4: ......
Страница 6: ......
Страница 20: ...14...







































































