




















AKULA 9000B USER MANUAL
/ SECTION 4
REV:EN05130513-03
Copyright 2006-2015 © Geoscanners AB
32
4.7
Depth Calibrating Tool
Sometimes we do not have any targets that could produce a hyperbola, but have some layer at a known depth
from the surface. The hyperbola tool in these cases is of little use and we need to use something else. We have
a depth calibration tool which will allow the user to pinpoint a target and enter the known depth to it. With that
information GAS™ calculates the relative dielectric permittivity and update the scales. In such a way all other
targets in that location will be identified at the correct depth.
As with the hyperbola fitting tool the depth calibration tool requires that the signal position or offset has bee
adjusted correctly and that the system is in record mode using distance mode. The first thing to do is to identify
the target for which we have depth information. When the target is clearly visible press the depth calibration tool
to enter the routine. Here there are also buttons on the b-scan area, but this time only two buttons: one with an
arrow up and one with an arrow down. A vertical red line with a short horizontal line also appears on the b-scan
area.
Move the antenna backwards until you have located the red line with the short horizontal line exactly on the target
we are interested in. Using the up or down buttons on the screen or the up/down arrows on your keyboard adjust
the position of the horizontal line so it is right on top of the know target.
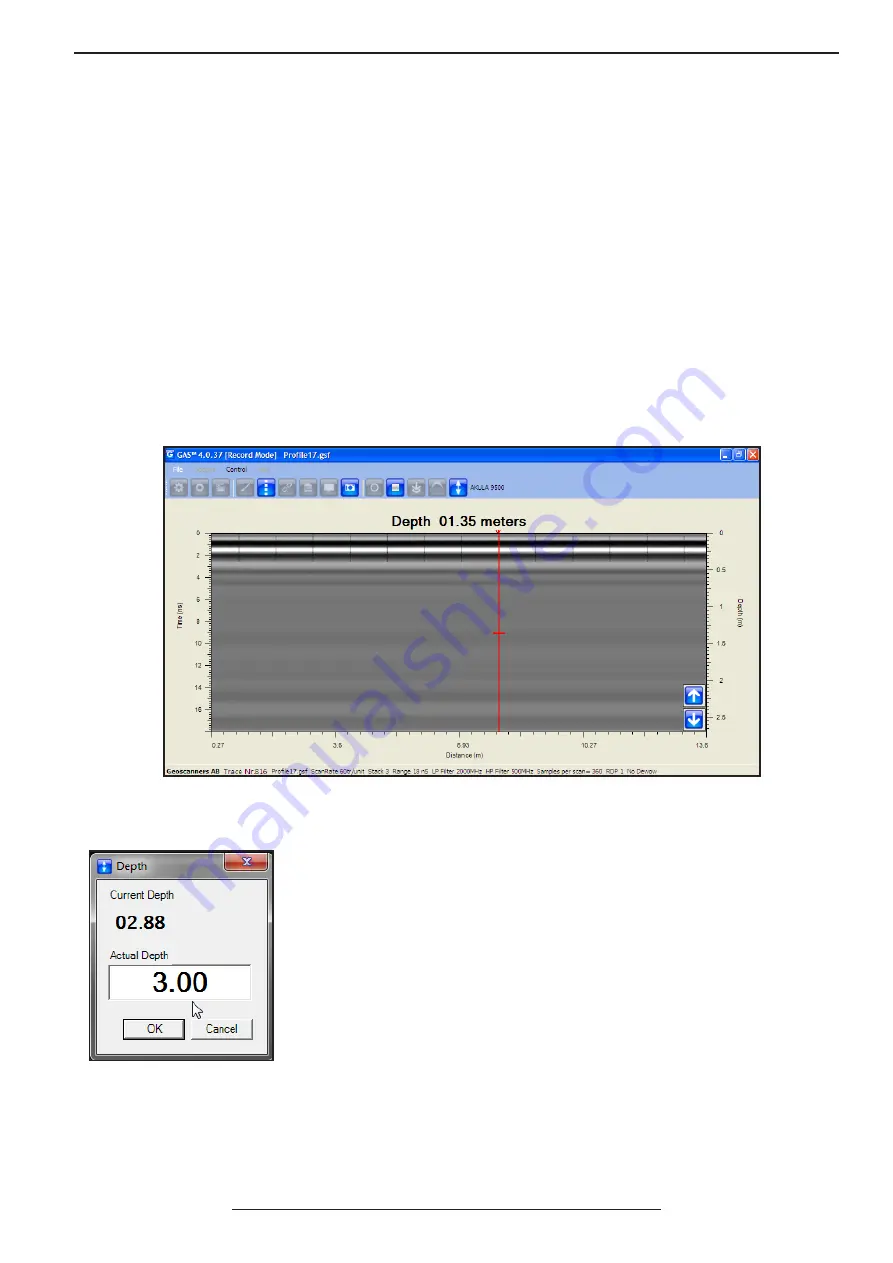
The current depth is displayed all the time at the top of the b-scan area. Now
that we have the vertical short line exactly on top of the known depth target
we can enter the correct value. Press the Depth tool button and a new dialogue
window appears showing the current depth according to the estimated relative
dielectric permittivity. In the field “actual depth” type in the correct depth to the
target and press “OK”. GAS™ will store the new correct value for the RDP and
will adjust the scales accordingly.
All other targets in this location can now be correctly identified and their true
depth from the surface estimated with a much better degree of accuracy.
Known target positioned and ready to calibrate the system.