




























ProNet series AC servo system User’s manual V.1.08
- 78 -
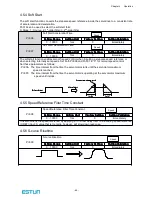
4.6.4 Smoothing
A filter can be applied in the servodrive to a constant-frequency reference pulse.
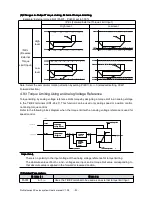
(1)Selecting
(1)Selecting
(1)Selecting
(1)Selecting a
a
a
a Position
Position
Position
Position Reference
Reference
Reference
Reference Filter
Filter
Filter
Filter
**** After
After
After
After changing
changing
changing
changing the
the
the
the parameter,
parameter,
parameter,
parameter, turn
turn
turn
turn OFF
OFF
OFF
OFF the
the
the
the power
power
power
power once
once
once
once and
and
and
and turn
turn
turn
turn it
it
it
it ON
ON
ON
ON again
again
again
again to
to
to
to enable
enable
enable
enable the
the
the
the new
new
new
new
setting.
setting.
setting.
setting.
(2)Filter-related
(2)Filter-related
(2)Filter-related
(2)Filter-related Parameters
Parameters
Parameters
Parameters
Pn204
Position Reference Acceleration/Deceleration Time Constant
Setting
Setting
Setting
Setting Range
Range
Range
Range
Setting
Setting
Setting
Setting Unit
Unit
Unit
Unit
Factory
Factory
Factory
Factory Setting
Setting
Setting
Setting
Setting
Setting
Setting
Setting Validation
Validation
Validation
Validation
0
~
32767
0.1ms
0
Immediately
■Important
When the position reference acceleration/deceleration time constant (Pn204) is changed, a value
with no reference pulse input and a position error of 0 will be enabled. To ensure that the setting
value is correctly reflected, stop the reference pulse from the host controller and input the clear
signal (CLR), or turn OFF to clear the error.
This function provides smooth servomotor operating in the following cases.
· When the host controller that outputs a reference cannot perform acceleration/deceleration
processing.
· When the reference pulse frequency is too low.
· When the reference electronic gear ratio is too high (i.e., 10× or more)
Parameter
Parameter
Parameter
Parameter
Description
Description
Description
Description
Pn205
0
:
1
st
-order filter
1
:
2
nd
-order filter
Position






































































