





























74
Unidrive M400 User Guide
Issue Number: 2
7.3.2 RFC - A mode (without position feedback)
Induction motor without position feedback
Action
Detail
Before power-up
Ensure:
•
The drive enable signal is not given (terminal 31 & 34)
•
Run signal is not given
Power-up the
drive
If the mode is incorrect see section 5.5
Ensure:
•
Drive displays ‘inhibit’
If the drive trips, see Chapter 13
Enter motor
nameplate
details
Enter:
•
Motor rated frequency in Pr
00.039
(Hz)
•
Motor rated current in Pr
00.006
(A)
•
Motor rated speed in Pr
00.007
(rpm)
•
Motor rated voltage in Pr
00.008
(V) - check if
or
connection
Set maximum
frequency
Enter:
•
Maximum frequency in Pr
00.002
(Hz)
Set acceleration /
deceleration
rates
Enter:
•
Acceleration rate in Pr
00.003
(s/100 Hz)
•
Deceleration rate in Pr
00.004
(s/100 Hz) (If braking resistor installed, set Pr
00.028
= FAST. Also ensure
Pr
10.030
, Pr
10.031
and Pr
10.061
are set correctly, otherwise premature ‘Brake R Too Hot’ trips may be
seen).
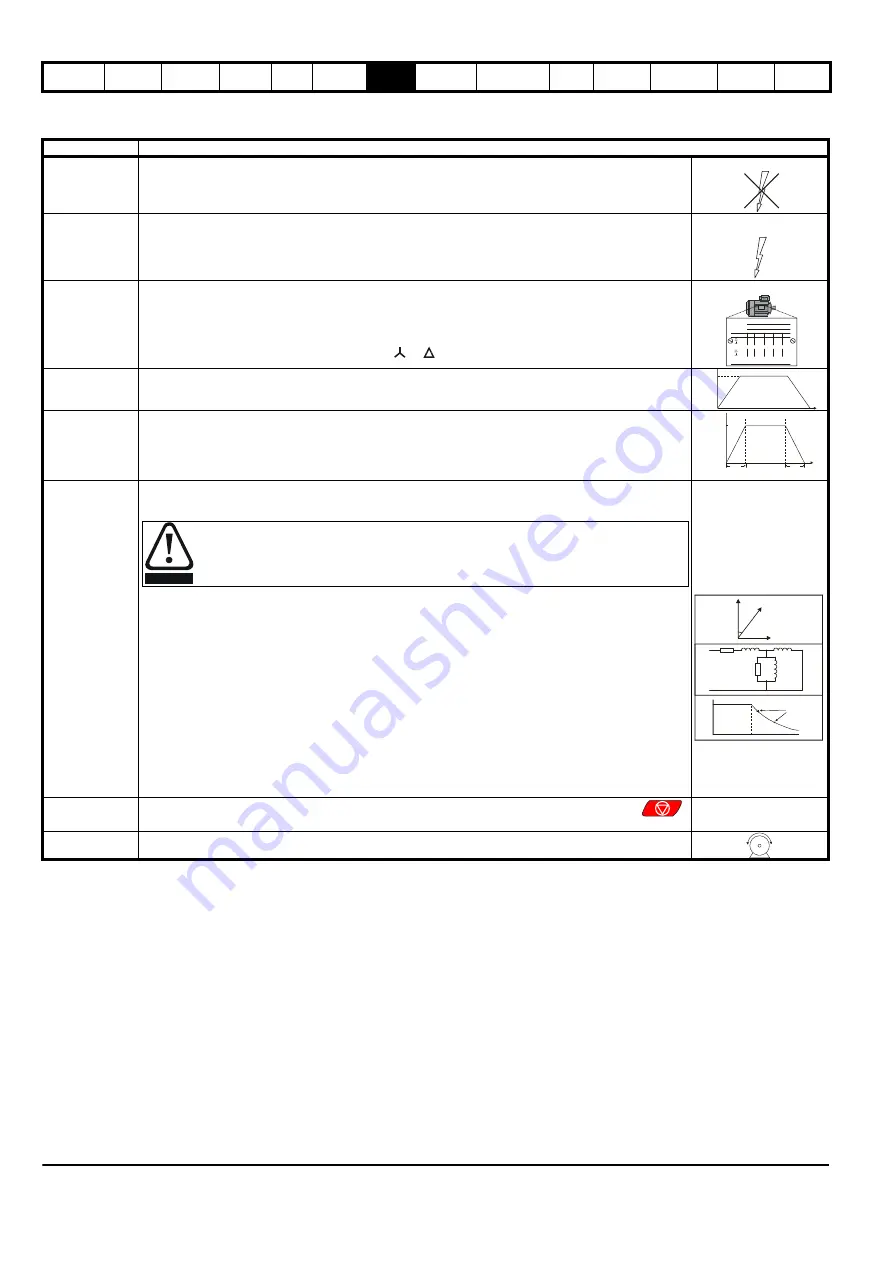
Autotune
The drive is able to perform either a stationary or a rotating autotune. The motor must be at a standstill before
an autotune is enabled. A stationary autotune will give moderate performance whereas a rotating autotune will
give improved performance as it measures the actual values of the motor parameters required by the drive.
•
A stationary autotune can be used when the motor is loaded and it is not possible to uncouple the load
from the motor shaft. The stationary autotune measures the stator resistance and transient inductance of
the motor. These are used to calculate the current loop gains, and at the end of the test the values in
Pr
04.013
and Pr
04.014
are updated. A stationary autotune does not measure the power factor of the
motor so the value on the motor nameplate must be entered into Pr
00.009
.
•
A rotating autotune should only be used if the motor is uncoupled. A rotating autotune first performs a
stationary autotune before rotating the motor at
2
/
3
base speed in the direction selected. The rotating
autotune measures the stator inductance of the motor and calculates the power factor.
To perform an autotune:
•
Set Pr
00.038
= 1 for a stationary autotune or set Pr
00.038
= 2 for a rotating autotune
•
Close the drive enable signal (terminal 31 & 34). The drive will display ’ready’.
•
Close the run signal (terminal 12 or 13). The display will flash ‘Auto Tune’ while the drive is performing the
autotune.
•
Wait for the drive to display ’Inhibit’ and for the motor to come to a standstill
If the drive trips, see Chapter 13
•
Remove the drive enable and run signal from the drive.
Save parameters Select 'Save Parameters' in Pr
mm.000
(alternatively enter a value of 1000 in Pr
mm.000
) and press red
reset button.
Run
The drive is now ready to run
Mot X XXXXXXXXX
No XXXXXXXXXX kg
IP55 I.cl F C 40 s S1
°
V
Hz min
-1
kW cos
φ
A
230
400
50 1445 2.20 0.80 8.50
4.90
CN = 14.5Nm
240
415
50 1445 2.20 0.76 8.50
4.90
CN = 14.4Nm
CTP- VEN 1PHASE 1=0,46A P=110W R.F 32MN
I.E
.C
3
4 1
(8
7)
0.02
t
1000rpm
0.03
t
0.04
A rotating autotune will cause the motor to accelerate up to
2
/
3
base speed in the direction selected
regardless of the reference provided. Once complete the motor will coast to a stop. The enable signal
must be removed before the drive can be made to run at the required reference.
The drive can be stopped at any time by removing the run signal or removing the drive enable.
WARNING
cos
∅
σ
L
S
T
Nm
N rpm
saturation
break-
points
R
S
L
S
Содержание Unidrive M400
Страница 197: ......
Страница 198: ...0478 0044 02 ...