





























Digitax ST User Guide
167
Issue Number: 5
Preset references
Preset references 1 to 8 are contained in Pr
1.21
to Pr
1.28
.
Keypad reference
If Keypad reference is selected the drive sequencer is controlled directly
by the keypad keys and the keypad reference parameter (Pr
1.17
) is
selected. The sequencing bits, Pr
6.30
to Pr
6.34
, and Pr
6.37
have no
effect and jog is disabled.
Precision reference
If Precision reference is selected the speed reference is given Pr
1.18
and Pr
1.19
.
12.22.2 Braking Modes
This parameter does not affect the acceleration ramp, as the ramp
output always rises at the programmed acceleration rate subject to the
current limits. It is possible in under some unusual circumstances in
open-loop mode (i.e. highly inductive supply) for the motor to reach a low
speed in standard ramp mode, but not completely stop. It is also
possible if the drive attempts to stop the motor with an overhauling load
in any mode that the motor will not stop when standard ramp mode or
fast ramp mode is used. If the drive is in the deceleration state the rate of
the fall of speed is monitored. If this does not fall for 10 seconds the
drive forces the speed reference to zero. This only applies when the
drive is in the deceleration state and not when the reference is simply set
to zero.
0: Fast ramp
Fast ramp is used where the deceleration follows the programmed
deceleration rate subject to current limits.
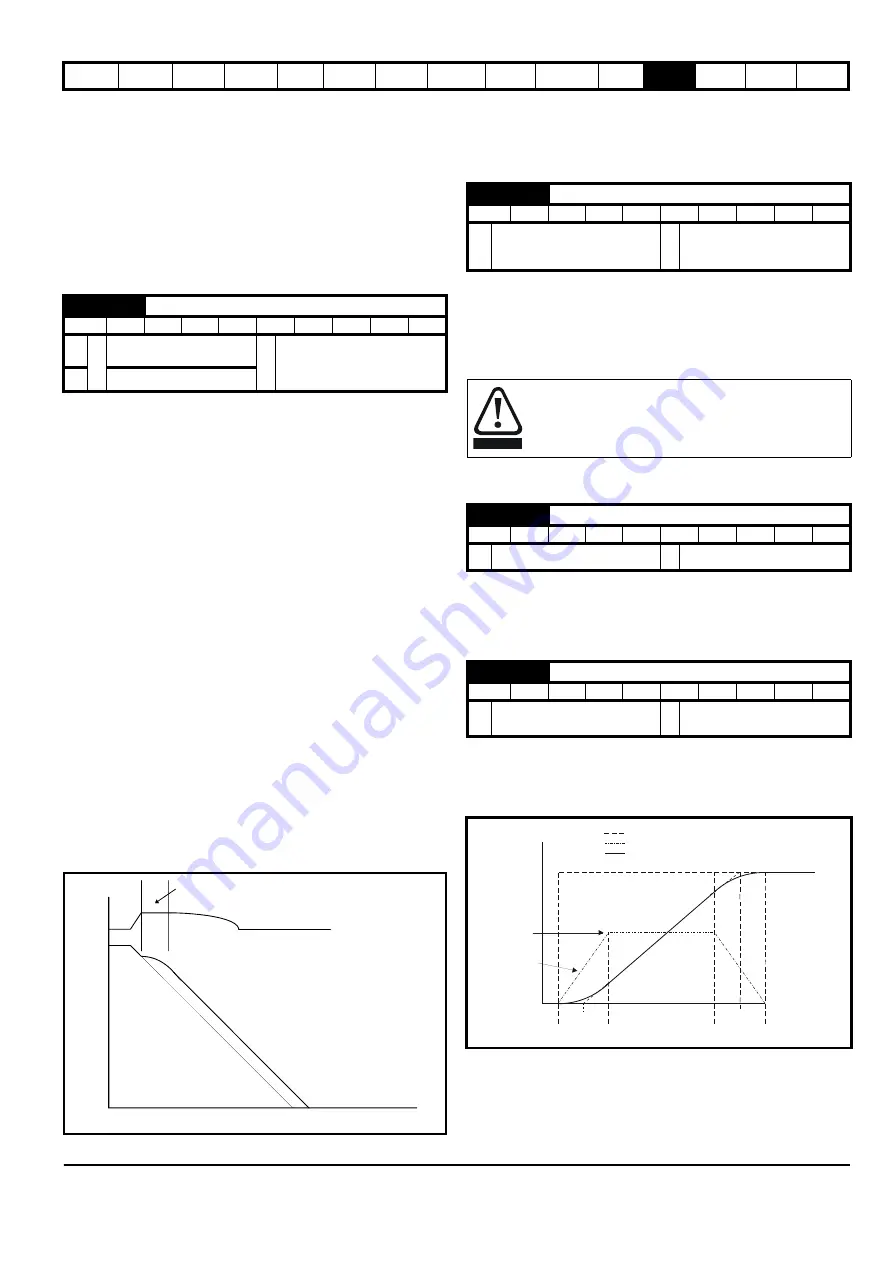
1: Standard ramp
Standard ramp is used. During deceleration, if the voltage rises to the
standard ramp level (Pr
2.08
) it causes a controller to operate, the output
of which changes the demanded load current in the motor. As the
controller regulates the DC bus voltage, the motor deceleration
increases as the speed approaches zero speed. When the motor
deceleration rate reaches the programmed deceleration rate the
controller ceases to operate and the drive continues to decelerate at the
programmed rate. If the standard ramp voltage (Pr
2.08
) is set lower
than the nominal DC bus level the drive will not decelerate the motor, but
it will coast to rest. The output of the ramp controller (when active) is a
current demand that is fed to the torque producing current controller
modes. The gain of these controllers can be modified with Pr
4.13
and
Pr
4.14
.
2: Standard ramp with motor voltage boost
This mode is the same as normal standard ramp mode except that the
motor voltage is boosted by 20 %. This increases the losses in the motor
giving faster deceleration.
This voltage is used as the control level for standard ramp mode. If this
parameter is set too low the machine will coast to rest, and if it is set too
high and no braking resistor is used the drive may give an over-volt ‘OV’
trip. The minimum level should be greater than the voltage produced on
the DC bus by the highest supply voltage. Normally the DC bus voltage
will be approximately the rms supply line voltage x
√
2.
12.22.3 S ramps
Setting this parameter enables the S ramp function. S ramp is disabled
during deceleration using standard ramp. When the motor is accelerated
again after decelerating in standard ramp the acceleration ramp used by
the S ramp function is reset to zero.
This parameter defines the maximum rate of change of acceleration/
deceleration. The default values have been chosen such that for the
default ramps and maximum speed, the curved parts of the S will be
25 % of the original ramp if S ramp is enabled.
Since the ramp rate is defined in s/100 Hz or s/1000 rpm and the S ramp
parameter is defined in s
2
/100 Hz or s
2
/1000 rpm, the time T for the
'curved' part of the S can be determined from:
T = S ramp rate of change / Ramp rate
Enabling S ramp increases the total ramp time by the period T since an
additional T/2 is added to each end of the ramp in producing the S.
2.04
Ramp mode select
RW
Txt
US
OL
Ú
FASt (0), Std (1),
Std.hV (2)
Ö
Std (1)
CL
FASt (0), Std (1)
DC bus voltage
Motor Speed
Programmed
deceleration
rate
t
Controller
operational
2.08
Standard ramp voltage
RW
Uni
RA
US
Ú
0 to
DC_VOLTAGE_SET_MAX V
Ö
200 V drive: 375
400 V drive: EUR> 750
USA> 775
Care should be taken in the setting of this parameter. It is
recommended that the setting should be at least 50V higher
than the maximum expected level of the DC bus voltage. If
this is not done, the motor may fail to decelerate on a STOP
command.
2.06
S ramp enable
RW
Bit
US
Ú
OFF (0) or On (1)
Ö
OFF (0)
2.07
S ramp acceleration limit
RW
Uni
US
Ú
0.000 to 100.000
s
2
/1000 rpm
Ö
0.030
WARNING
t
Acceleration
Actual Speed
Programmed
ramp rate
T
T
T/2
T/2
T/2
T/2
S ramp
acceleration
ramp
Demanded Speed
Содержание Digitax ST
Страница 1: ...User Guide AC variable speed drive for servo motors Part Number 0475 0001 05 Issue 5 ...
Страница 209: ......
Страница 210: ...0475 0001 05 ...





















































