





























February 2019
User Instructions
MAN-02-04-60-0350-EN Rev. 3
53
Section 7: Parameter Menu
Parameter Menu
7.12
Parameter Group: Positioner (option)
The positioner SR option is used to control the electric actuator by means of a set point
input 0/4-20 mA signal. The SR helps control the position of the actuator, i.e. the positioner
ensures that the actual value and thus the position of the actuator matches the desired
set point.
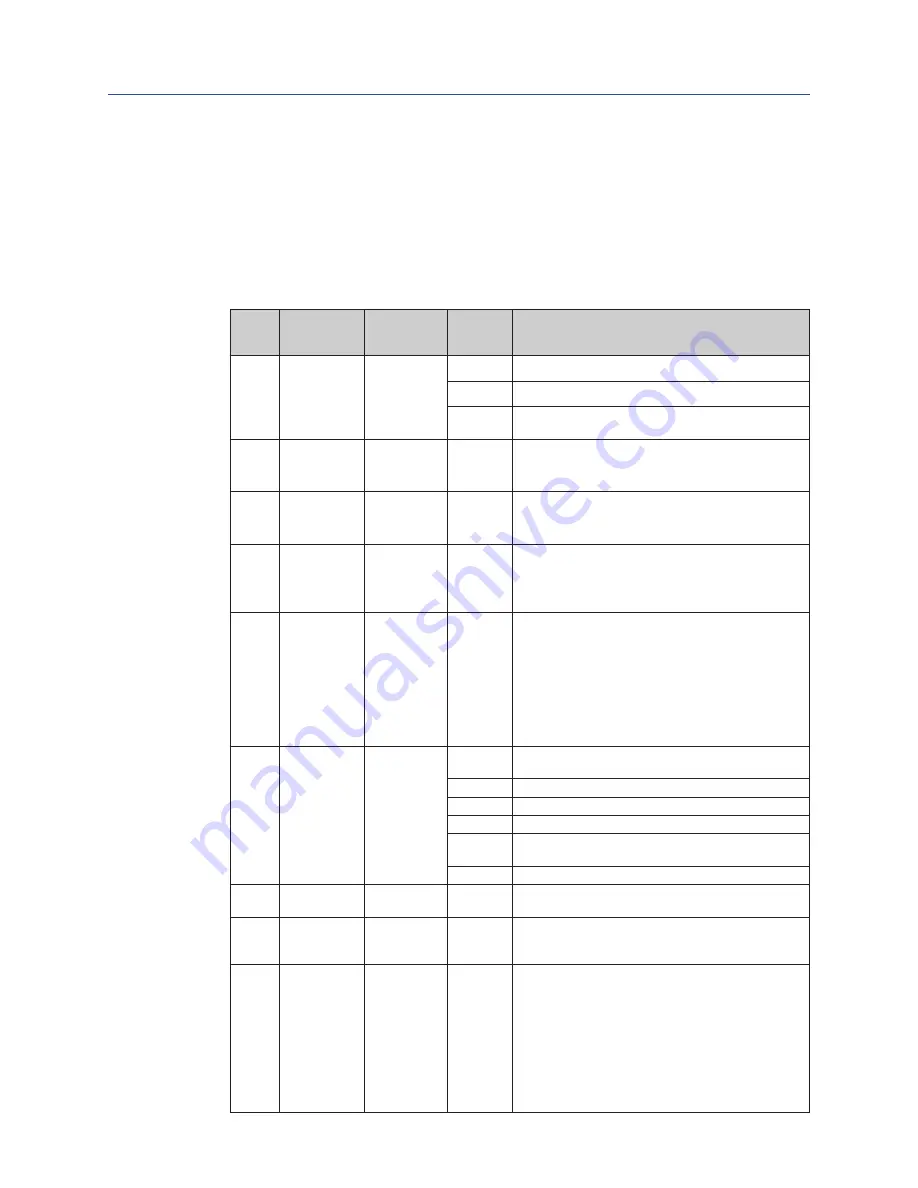
Table 19.
Positioner Parameter Group (1)
Menu Item
Sub Menu
Item
Poss. Set-
ting
Notes / Comments
P13.1
Positioner
Function
Off
Positioner disabled
Position
mAinput for the position setpoint
Pos.
Valvechar
mA input for the position setpoint, taking into account
the valve characteristic
P13.2
Positioner
Begin (at 0%)
0 – 20,5
mA
{4,0 mA}
mA value of the setpoint for the CLOSED (0%) position
P13.3
Positioner
End (at 100%)
0 – 20,5
mA
{20,0 mA}
mA value of the setpoint for the OPEN (100%) position
P13.4
Positioner
Dead band
0,1 –
10,0%
{1,0%}
Tolerance range for the control deviation (set point
position - actual position) where no adjustment occurs.
The deadband should not be set too low to prevent
actuator oscillation
P13.5
Positioner
Gain
1 – 100%
{100%}
The gain (gradient) affects the positioning close to
the target position. The smaller the gain selected (for
example, 20%), the earlier the actuator starts reducing
its speed in case of speed variable actuators on
approaching the target position. In case of actuators
with fixed speed (reversing starters) the speed reduction
is done by pulsing (also see params P13.9 and P13.10).
This provided a better positioning (smaller reachable
deadband). A 100% setting disables this gradient.
P13.6
Positioner
Live zero
detect.
Ignore
The setpoint monitoring (monitoring the setpoint to
below approximately 2mA = loss of signal) is disabled
{Stop}
Actuator stops on signal failure
Open
On signal failure, actuator moves the OPEN position
Close
Actuator moves on signal failure to the CLOSED position
Emerg.
pos.
On signal failure, the actuator moves the defined
emergency position (see parameter P13.7)
Emerg. PID Reserved for future use
P13.7
Positioner
Emergency pos.
0 - 100%
{50,0%}
Determination of the emergency position
(Can also be set in the menu P8.5)
P13.8
Positioner
Calib. setpoint
-10% -
+10%
Calibration value for the mA setpoint. Calibration
process: By applying 20 mA on the setpoint input, this
parameter is corrected until the readout matches 20 mA.
P13.9
Positioner
Min. impulse
{0,2 s}
Variable speed actuators (Bettis RTS CM and Smartcon
CSC FU): Without function Fixed speed actuators
(Smartcon CSC): Minimum activation time of the
reversing contactors. For very small activation times
(<0.3 - 0.5 s), the motor will be switched off during
start-up process, which significantly increases
mechanical wear on reversing contactors. With frequent
periods of very small activation times (restless loop,
small dead zone, clocking near to the target value), we
therefore recommend electronic reversing contactors.







































































