




























8
User Manual
MN040024EN
Effective November 2016
DX-NET-ETHERNET2-2 fi eld bus connection
EtherNet/IP for variable frequency drive DE1/DC1
EATON
www.eaton.com
General information regarding the EtherNet/IP and
MTP protocols
The EtherNet/IP protocol relies on the Modbus Translator Protocol
in order to transfer data. It supports the following types of
communication:
The EtherNet/IP protocol provides access to the module’s data via
standard services and manufacturer-specific object classes. MTP
object classes contain, for example, basic information concerning
the device (device name, manufacturer, etc), as well as access to
cyclic input/output data.
Standard Modbus object classes
The following standard EtherNet/IP classes are supported in
accordance with the MTP Specification:
Table 6. Standard Modbus object classes
Class
Property name
Description
0x01
Identity Object
Information about the device, such as the
manufacturer, device model, etc.
0x02
Message Router Object Communication interface that can be used
to generate requests for all of the device’s
classes and instances
0x06 Connection
manager
Object
Used to manage internal resources for I/O
and explicit messaging connections
0x45
Modbus Serial Object
—
0xF4
Port Object
Device port description
0xF5
TCP/IP Interface Object Information regarding the TCP/IP interface’s
settings
0xF6
Ethernet Link Object
Status information for an Ethernet 802.3
interface
Service codes
The following standard EtherNet/IP service codes are used in
accordance with the MTP Specification:
•
0x01 Identity
•
0x02 Message Router
•
0x04 Assembly
•
0x06 Connection manager
•
0x0F Parameter
•
0x44 Modbus
Drive parameters may be accessed using unconnected or Class 2/3
connection via following methods:
Table 7. Drive parameters
Class
Service
Description
0x0F Parameter
0x0E Get_Attribute_Single
Individual parameter Read/Write
Instance 1 = holding register 0
0x10 Set_Attribute_Single
0x44 Modbus
Object
0x4E Read_Holding_Registers
Multiple parameter Read/Write
Instance 1 = holding register 0
0x50 Write_Holding_Registers
0x04 Assembly
Object
0x18 Get_Member
0x19 Set_Member
Additional class services are support by the DX-ETHERNET2-2, however, when called errors
may be returned due the Drives not supporting the functionality
For Drive specific allocation, refer to Drive User Manual and/or
EtherNet/IP EDS file.
For Drive specific read/write limitations, refer to Drive User Manual
and/or EtherNet/IP EDS file.
ote:
N
DC and DE drives only support multiple write commands where the
data length = 1 parameter, with the following exceptions:
•
DE1 FW version XXX and above: PDI parameters may be written
as a block of 4
•
DC1 FW version XXX and above: PDI parameters may be written
as a block of 4
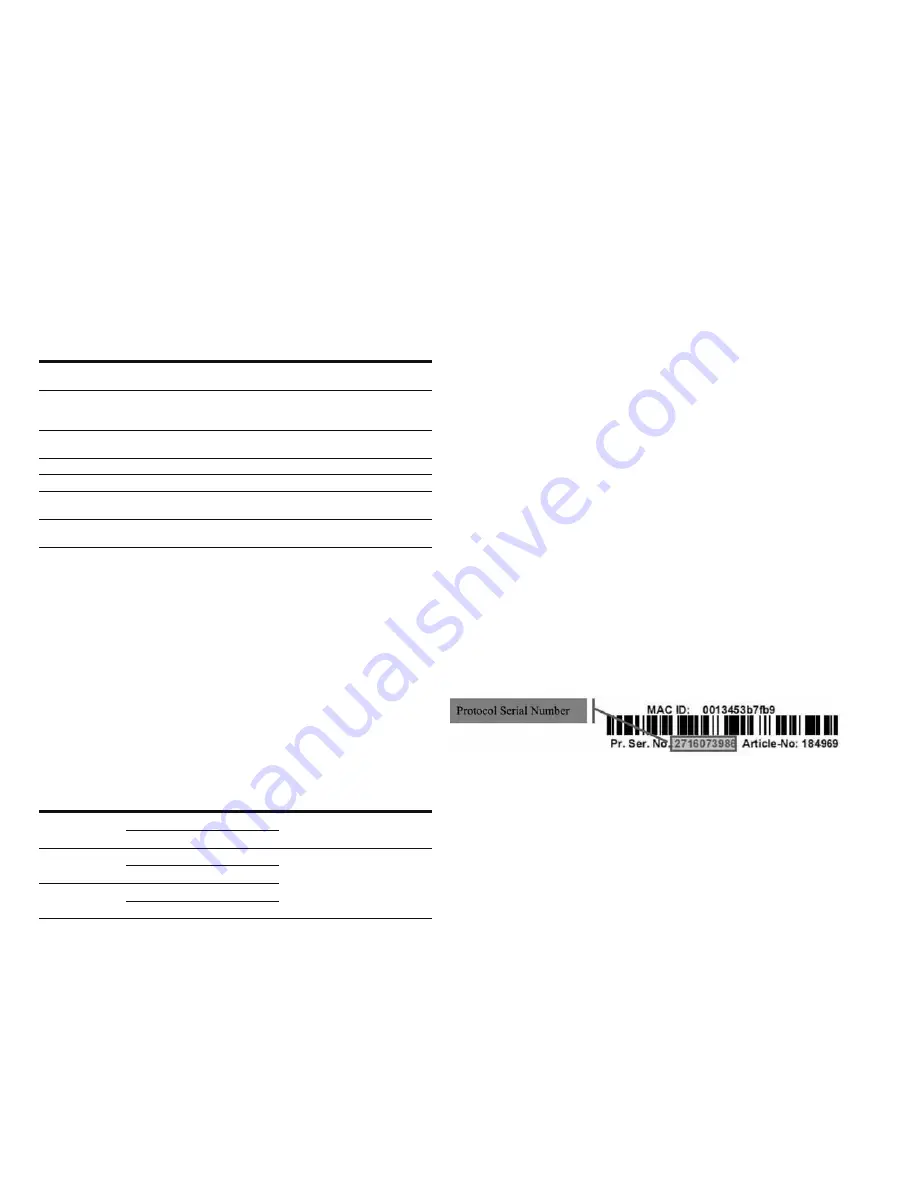
Addressing
EtherNet/IP devices are addressed with both MAC and IP addresses.
Every single device has a globally unique MAC address (a 6-byte-
long Ethernet address): The first three bytes define the manufacturer-
specific ID, while the three remaining bytes define the device’s serial
device number.
The MAC address will be printed on the corresponding nameplate.
The Static function will be enabled by default with an IP Address
of 192.168.1.254, subnet mask 255.255.255.0 from Eaton.
By having an IP address assigned to it, the variable frequency drive
can be integrated into the EtherNet/IP environment and enabled.
The remaining parameters can then be configured by the higher-level
master in a fully automatic manner.
IP configuration can be changed using:
•
the TCP/IP Class 0xF5, values will not be applied until an
Identity Class 0x01 reset is executed
•
via the webserver interface
DX-NET-ETHERNET2-2 can be accessed at:
•
http://192.168.1.254 (default), once changed it would follow
new IP address.
•
Via hostname http://DX-xxxxxxxxxx, where xxxxxxxxxx =
‘Protocol, Ser. No.’ printed on the product label that is located
on the top of the module.
Both of the above values can be modified via the Web Server or
EtherNet/IP Class 0xF4.
Содержание PowerXL DX-NET-ETHERNET2-2
Страница 2: ......






































































