





























35
DYN2MS-02F-0116A17
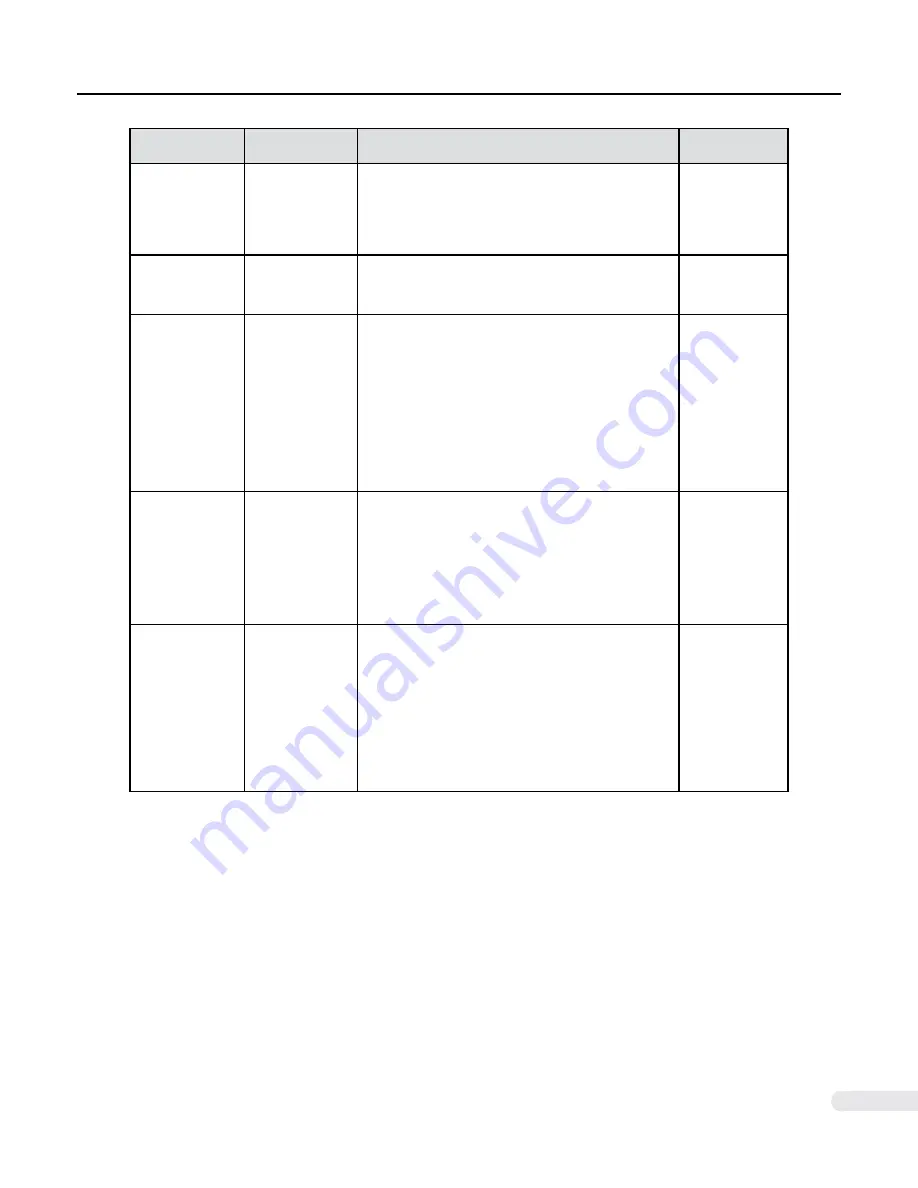
5.1 Parameters Outline
Parameter Name
Setting Range
Details
Applicable Servo
Mode
Max Acceleration
[ 1 : 127 ]
Determine the S-curve acceleration when using RS232
mode to make point to point motion linear/circular. Also
controls the response time of the first order low pass filter
in speed and torque servo control (soft start).
RS232
Speed
Torque
Max Speed
[ 1 : 127 ]
Determine the S-curve max speed when using RS232
mode to make point to point motion linear/circular.
RS232
Driver ID
[ 1 : 126 ]
Every drive has a unique ID number, which can be
assigned or read out by using ServoSetting dialog box.
Applicable when RS485net box not checked and there is
only one Drive connected through the RS232 port.
The default ID number for every Drive is 0. That ID num
-
ber can be used for the network connection of RS485 or
for drive unit identification purposes. When RS485net box
is checked and there are more than one Drive connected
to the RS485/232 network, only the setting for the Drive
with the indicated ID number in the ServoSetting dialog
box can be read out or saved.
Position
Speed
Torque
RS232/485
On Position Range
[ 1 : 127 ]
On position range is a value used for determining whether
the motor have reached the command position or not.
That on position range is selectable according to user’s
requirement. Suppose the Pset is the commanded posi
-
tion, and Pmotor is the real motor position, if
|Pset - Pmotor|<=OnRange
it is said motor is on the commanded position, otherwise
not.
Position
Speed
Torque
RS232
Gear Num
[ 500 : 16,384 ]
The amount of motor travel with reference to the number
of input pulses is set using the parameter Gear_Num.
The number of reference pulse needed for one complete
motor revolution is calculated as,
One motor revolution = 4xGEAR_NUM
For example, if Gear_Num is set to 4096, then 16,384
pulses are needed from the host controller for the motor to
make one complete revolution.
Position
RS232







































































