


























KX-2 Robot
–
User’s Manual
Peak Robotics, Inc.
4747 Centennial Blvd; Colorado Springs, CO 80919
Ph 719.598.3555,
Printed: 3/3/2021
Page
11
6.0 Product Description
6.1 Description: The KX-2 is a tabletop cylindrical robot designed for laboratory and light industrial
applications.
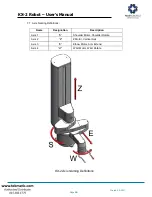
6.2 Technology: The robot has four axes of motion and incorporates a combination zero-backlash
harmonic drive gearboxes and belt drives driven by DC servomotors. Motion control is
accomplished via true absolute encoders and distributed motor drives. The vertical Z axis
contains a counterweight to minimize required thrust and to eliminate the need for a Z brake.
6.3 Work Envelope: The two rotary joints of the robot have unlimited travel, allowing the robot to
access all locations around it with no dead zones.
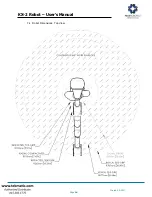
6.4 Telescoping Arm: The robot achieves extreme reach and is also highly compact thanks to a
multilink arm design. Radial motion of the arm eliminates the operating complexity and
awkwardness inherent in a typical SCARA two-link robot arm.
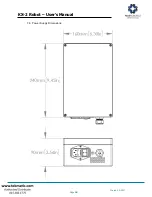
6.5 Standard Models: There are two standard heights available. The KX-2 500 has 500mm of
vertical travel, and the KX-2 750 has 750mm of vertical travel. The arm has 677mm of
horizontal reach (center of shoulder to center of wrist). An electric gripper comes standard on
the robot and has the following finger options: Top-Grip (TGF), Side-Grip (SGF), and Portrait-
Jog Side-Grip (SGJF). Side-Grip fingers add 110mm to the horizontal reach of the arm, and
Portrait-Jog Side-Grip fingers add 116mm.
KX-2 500
KX-2 750
Содержание PEAKROBOTICS KX-2
Страница 2: ......





































































