





























KX-2 Robot
–
User’s Manual
Peak Robotics, Inc.
4747 Centennial Blvd; Colorado Springs, CO 80919
Ph 719.598.3555,
Printed: 3/3/2021
Page
35
5) Have an assistant hold the robot so that it does not tip over. Extending the arm
about halfway will help to stabilize the robot. Install three M6x16 SHCS (each
with a flat washer positioned against the head and with the rounded edge facing
downward) through the mounting ears on the bottom of the robot, and thread
them into the Robot Mount Plate. Tighten the mounting screws very firmly (8
Nm). Removable-strength thread locker such as Loctite 242 is recommended.
10.3 Removal of the Arm & Counterweights:
10.3.1 If an assistant is not available to help lift and install the robot, then it may be
necessary to detach the arm from the Z axis and remove the Z counterweights to
reduce the weight of the robot, as follows:
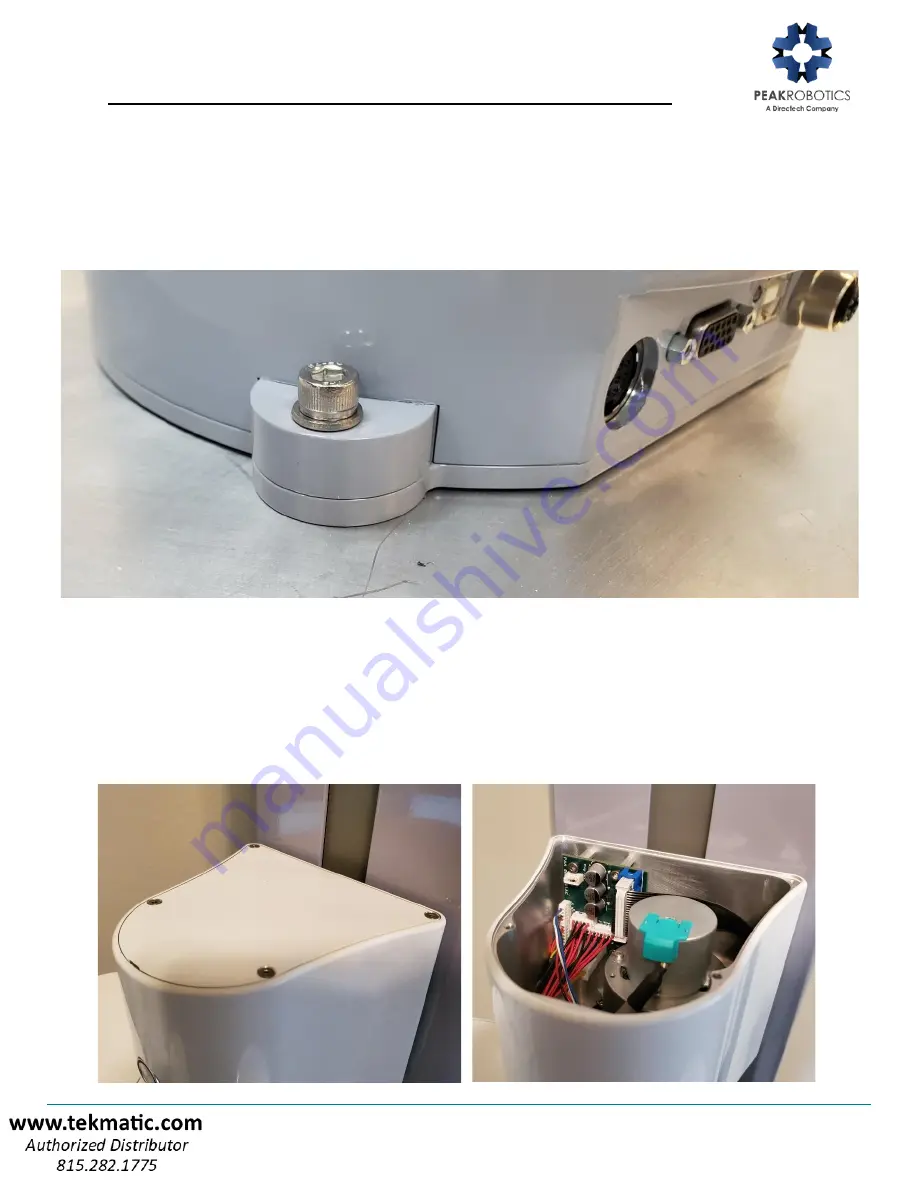
•
Remove the four M3x6 FHCS screws from the Elbow top cover and remove
the cover. A small flathead screwdriver can be inserted into the notch in the
cover to simplify removal.
Содержание PEAKROBOTICS KX-2
Страница 2: ......