



















Using the diagnostic program
The diagnostic software allows you to test all of the robots sensors and motors. To use the program you must
have the Arduino Programming Environment loaded on your computer (version 18 or later).
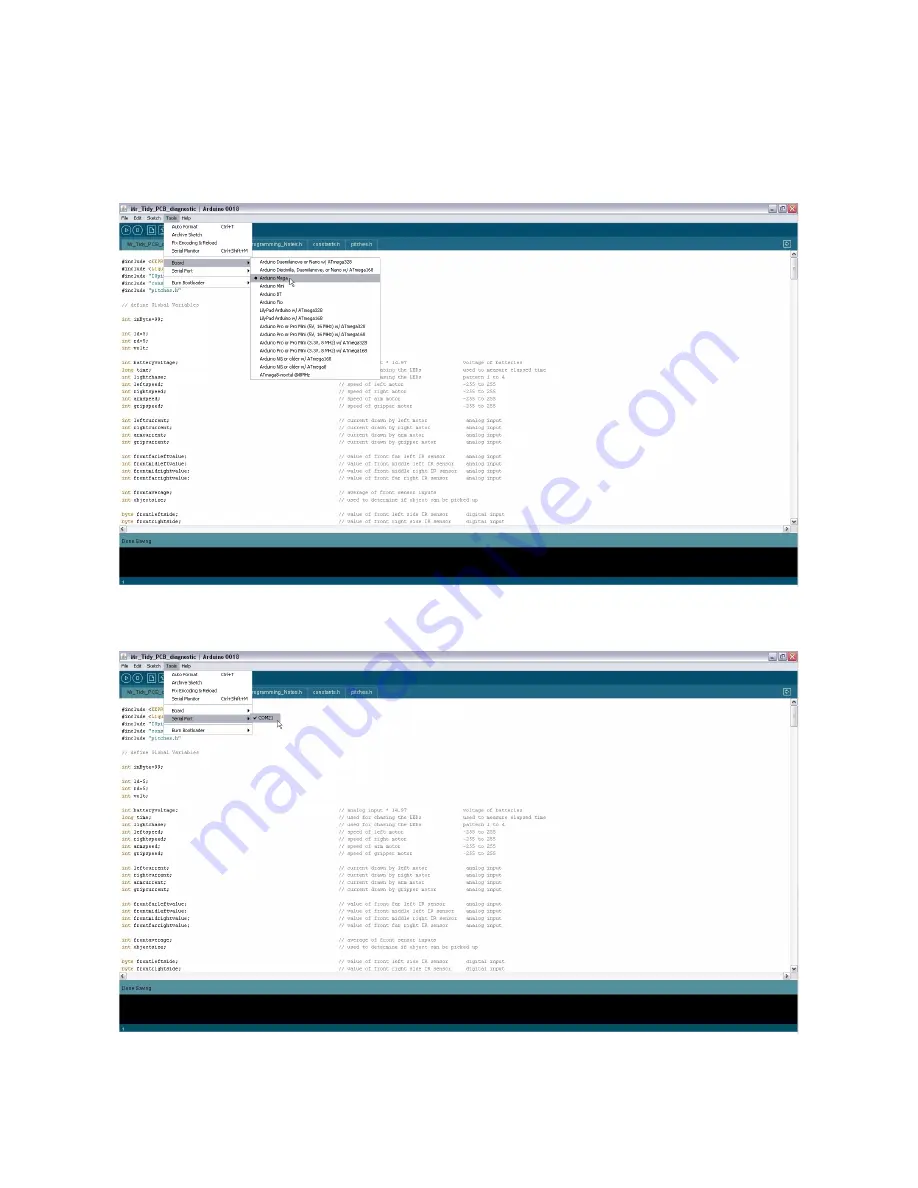
Open the program Mr_Tidy_PCB_diagnostic. Go to the tools menu and select the “Arduino Mega” as your
board type.
Make sure the robot is connected to the computer via the USB cable and turned on so that the computer can
detect it. Select the serial port.
16
Содержание MR. Tidy
Страница 3: ...Main board Features 3...







































































