





























Computec
CDD6
EN
CDD6: user manual – rev.07
Page 38/74
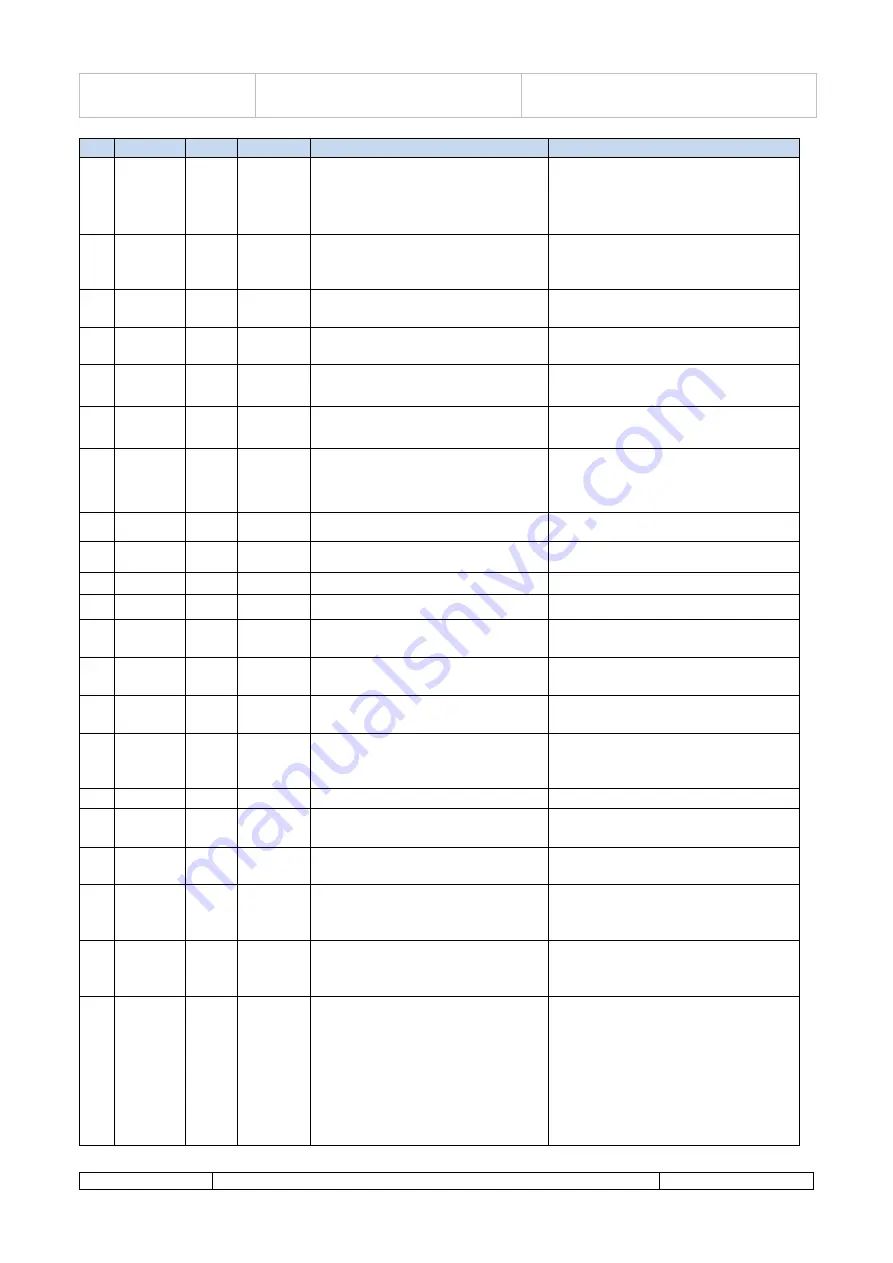
N°
RANGE
UNIT
DEFAULT
Name
Values Description
32
[0 ; 3]
-
0
AUXC input options
00 = disabled
01 = partial opening floor input (P-23)
02 = AFT with back-step
03 = AFT with torque free
34
[0 ; 2]
-
0
RVS output signal type
00 = active until DOC (from MLC)
01 = active until DOS
02 = active until P-81 time (pulse)
35
[ 0 ; 1]
-
0
RVS output signal when door open
00 = OFF
01 = ON
41
[1 ; 30]
s
2
Timeout after AFT or opening force
limiter intervention
Pause time after AFT intervention or
opening force limiter intervention
43
[0 ; 1]
-
0
Door opened parking without
torque
00 = disabled
01 = enabled
47
[0 ; 99]
S
30
Timeout detectors failure
Delay to start force closing in case of
detector failure
49
[0 ; 99]
S
0
CL evacuation delay
Delay to start parking with open
skate, to be enabled for EN81-20
requirements
68
[0 ; 15]
cm
5
RSE disabling space at door open
Blind zone for RSE when door open
69
[0 ; 15]
cm
5
RSE disabling space at door closed
Blind zone for RSE when door closed
70
-
-
-
Speed profiles reset
Trigger to reset speed profiles
71
-
-
-
Parameters reset
Trigger to reset all parameters
80
[0 ; 5]
s
1
Closing delay when door opened
after inversion
Active only if P-00=0
81
[5 ; 15]
s 10
-1
5
RVS output activation time
When P-34=2 this parameter defines
the RVS output active time (5
0.5s)
82
[0 ; 1]
-
0
DCS signal management during
Unlocking jam retries
00= DCS always inactive during retries
01= DCS changes status during retries
84
[0 ; 20]
cm
10
Parking Mode position error
Position offset respect to the skate
open position to detect the loss of
DCS output
85
[5 ; 20]
cm/s
10
Synchronization trips speed
Speed for synchronization trips
86
[0 ; 1]
-
1
Storage of estimated motor
temperature
00 = disabled
01 = enabled
87
[1 ; 3]
-
1
CAN open door number
Door ID in case of CAN bus connection
(P-99=4)
90
0,1,2,3,
4,12,13,
…23
-
0
Installed motor type
0 = self-recognized
for values different from zero, please
refer to the motors compatibility table
91
0,1,2,3,
4,12,13,
…23
-
0
Recognized motor type
Represents the ID of the recognized
motor, when P-90 = 0. If P-90
≠
0, reports
the last recognized ID.
99
[0 ; 4]
-
0
MLC commands interface logic
0 = DOC DCC RSC in normal logic, RSC is
forced closing signal
1 = DOC DCC RSC in reversed logic, RSC is
a reduced speed movement enable signal
2 = DOC DCC RSC in normal logic, RSC is a
reduced speed movement enable signal
3 = DOC DCC RSC in reversed logic, RSC is
forced closing signal
4 = CAN open