



























Ascon Tecnologic - KX Line - ENGINEERING MANUAL -Vr.4.0
PAG. 16
Available:
When [55] cont = PID
Range:
YES = self-tune active;
no =
self-tune not active.
[59] HSEt - Hysteresis of the ON/OFF control
Available:
When [55] cont is different from PID.
Range:
0... 9999 engineering units.
[60] cPdt - Time for compressor protection
Available:
When [55] cont = nr
Range:
OFF = Protection disabled
1... 9999 seconds.
[61] Pb - Proportional band
Available:
When [55] cont = PID and [58] SELF = no
Range:
1... 9999 engineering units.
Note:
Auto-tune functions calculate this value.
[62] ti - Integral time
Available:
When [55] cont = PID and [58] SELF = no
Range:
OFF = Integral action excluded
1... 9999 seconds
inF= Integral action excluded
Note:
Auto-tune functions calculate this value.
[63] td - Derivative time
Available:
When [55] cont = PID and [58] SELF = no
Range:
oFF - derivative action excluded
1... 9999 seconds
Note:
Auto-tune functions calculate this value.
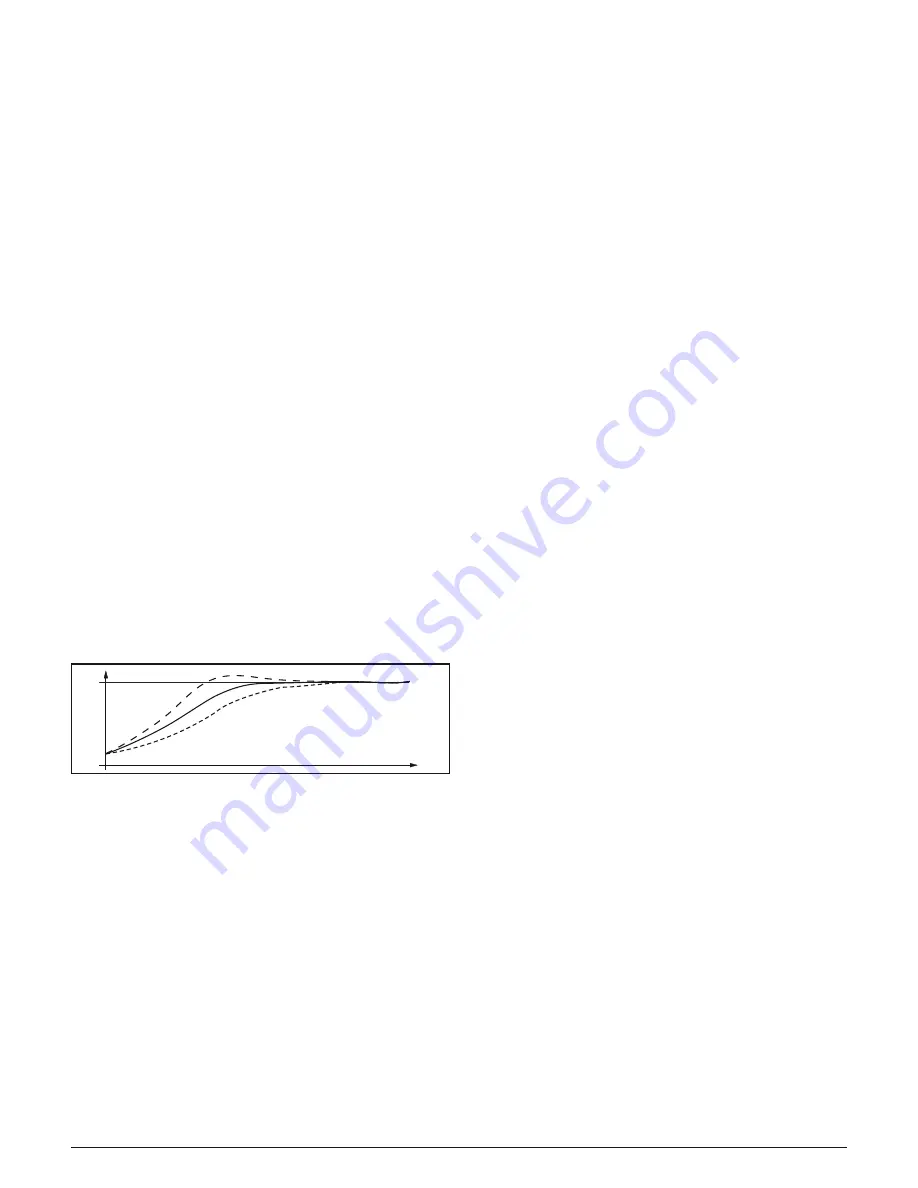
[64] Fuoc - Fuzzy overshoot control
This parameter reduces the overshoot usually present at
instrument start up or after a set point change and it will be
active only in this two cases.
Setting a value between 0.00 and 1.00 it is possible to slow
down the instrument action during set point approach.
Setting
Fuoc = 1
this function is disabled.
PV
SP
time
2
1
3
Available:
When [55] cont = PID and [58] SELF = no.
Range:
0... 2.00.
Note:
Fast auto-tune calculates the Fuoc parameter while
the oscillating one sets it equal to 0.5.
[65] tcH - Cycle time of the heating output
Available:
When at least one output is programmed in order
to be the heating output (H.rEG),
[55] cont = PID and [58] SELF = no.
Range:
1.0... 130.0 seconds
[66] rcG - Power ratio between heating and cooling
action
(relative cooling gain)
The instrument uses the same PID parameter set for heat
and for cool action but the efficiency of the two actions are
usually different.
This parameter allows to define the ratio between the efficien-
cy of the heating system and the efficiency of the cooling one.
An example will help us to explain you the philosophy.
Consider one loop of a plastic extruder. The working tem-
perature is equal to 250°C.
When you want to increase the temperature from 250 to
270°C (
D
T = 20°C) using 100% of the heating power (resis-
tor), you will need 60 seconds.
On the contrary, when you want to decrease the temperature
from 250 to 230°C (
D
T = 20°C) using 100% of the cooling
power (fan), you will need 20 seconds only.
In our example the ratio is equal to 60/20 = 3 ([66] rcG = 3)
and it say that the efficiency of the cooling system is 3 time
more efficient of the heating one.
Available:
When two control action are programmed
(H.rEG and c.rEG) and
[55] cont = PID and
[58] SELF = no
Range:
0.01... 99.99
Note:
auto-tune functions calculate this value.
[67] tcc - Cycle time of the cooling output
Available:
When at least one output is programmed in order
to be the cooling output (c.rEG), [55] cont = PID
and [58] SELF = no
Range:
1.0... 130.0 seconds.
[68] rS - Manual reset (integral pre-load)
It allows to drastically reduce the undershoot due to a
hot restart. When your process is steady, the instrument
operates with a steady power output (e.g.: 30%).
If a short power down occurs, the process restarts with a
process variable close to the set point while the instrument
starts with an integral action equal to zero.
Setting a manual reset equal to the average power output
(in our example 30%) the instrument will start with a power
output equal to the value it will use at steady state (instead
of zero) and the undershoot will become very little (in theory
equal to zero).
Available:
When [55] cont = PID.
Range:
-100.0... +100.0%.
[69] Str.t - Servomotor stroke time (KX3 servo only)
Available:
When [55] cont = 3Pt.
Range:
5... 1000 seconds;
[70] db.S - Servomotor dead band (KX3 servo only)
Available:
When [55] cont = 3Pt.
Range:
0... 100%;
[71] od - Delay at power up
Available:
When at least one output is programmed as
control output.
Range: •
oFF: Function not used;
•
0.01... 99.59 hh.mm.
Notes: 1.
This parameter defines the time during which
(after a power up) the instrument remains in stand
by mode before to start all other function (control,
alarms, program, etc.).
2.
When a program with automatic start at power up
and od function are programmed, the instrument
performs od function before to start the program
execution.
3.
When an auto-tune with automatic start at power
up and od function are programmed, the autotune
will start at the end of od delay.