



























Ascon Tecnologic - KX Line - ENGINEERING MANUAL -Vr.4.0
PAG. 15
[54] LbcA - Condition for LBA enabling
Available:
when [51] LbAt is different from oFF
Range:
uP =
Enabled when the PID requires the maxi-
mum power only.
dn =
Enabled when the PID requires the mini-
mum power only
both = Enabled in both condition (when the PID re-
quires the maximum or the minimum power).
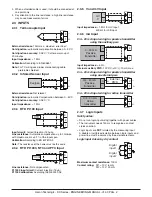
LBA application example:
LbAt (LBA time) = 120 seconds (2 minutes)
LbAS (delta LBA) = 5°C
The machine has been designed in order to reach 200°C in
20 minutes (20°C/min).
When the PID demands 100% power, the instrument starts
the time count.
During time count if the measured value increases more
than 5°C, the instrument restarts the time count. Otherwise
if the measured value does not reach the programmed delta
(5°C in 2 minutes) the instrument will generate the alarm.
]
rEG group - Control parameters
The rEG group will be available only when at least one
output is programmed as control output (H.rEG or C.rEG).
[55] cont - Control type:
Available:
When at least one output is programmed as con-
trol output (H.rEG or C.rEG).
Range:
When two control action (heat & cool) are programmed:
Pid =
PID (heat and cool)
nr =
Heat/Cool ON/OFF control with neutral zone
HSEt
HSEt
SP
PV
time
OUTH.rEG
(heating)
OUTc.rEG
(cooling)
off
ON
ON
off
off
ON
When one control action (heat or cool) is programmed:
Pid =
PID (heat or cool);
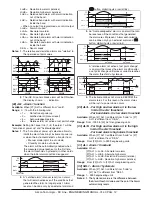
On.FA = ON/OFF asymmetric hysteresis;
On.FS = ON/OFF symmetric hysteresis;
3Pt =
Servomotor control (available when Output
2 and Output 3 have been ordered as “
M
”).
HEAt - On.FA
OUT
H.rEG
SP
PV
HSEt
time
off
off
C ooL - O n.FA
OUT
C.rEG
SP
PV
HSEt
time
ON
ON
ON
off
off
ON
ON
ON
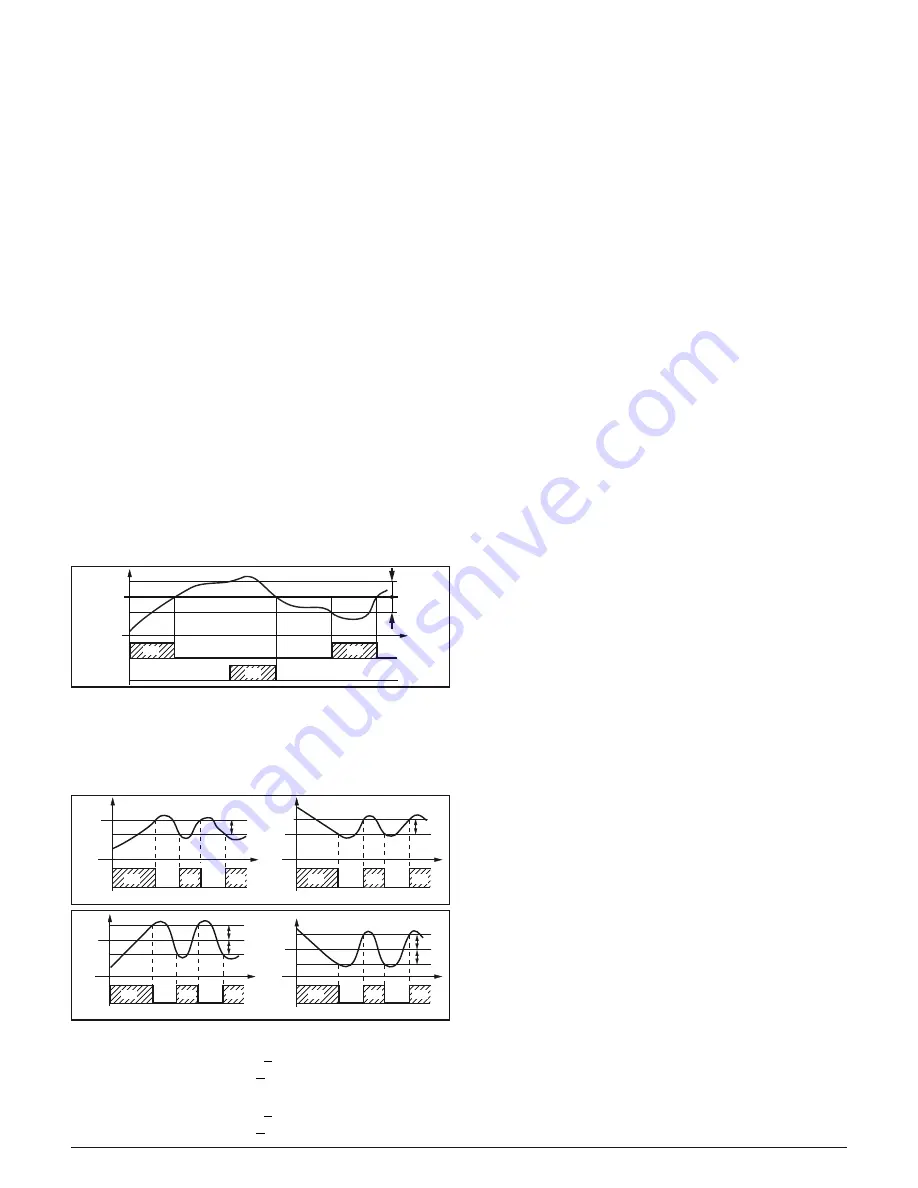
HEAt - On.FS
OUT
H.rEG
SP
PV
HSEt
HSEt
time
C ooL - O n.FS
OUT
H.rEG
SP
PV
HSEt
HSEt
time
ON
ON
ON
off
off
off
off
ON
ON
ON
Notes: 1.
ON/OFF control with asymmetric hysteresis:
•
OFF when PV > SP
•
ON when PV < (SP - hysteresis)
2.
ON/OFF control with symmetric hysteresis:
•
OFF when PV > (SP + hysteresis)
•
ON when PV < (SP - hysteresis)
[56] Auto - Auto tune selection
Ascon Tecnologic has developed three auto-tune algorithms:
–
Oscillating auto-tune;
–
Fast auto-tune;
–
EvoTune.
1. The
oscillating
auto-tune is the usual auto-tune and:
•
It is more accurate;
•
Can start even if PV is close to the set point;
•
Can be used even if the set point is close to the
ambient temperature.
2. The
fast type
is suitable when:
•
The process is very slow and you want to be opera-
tive in a short time;
•
When an overshoot is not acceptable;
•
In multi loop machinery where the fast method
reduces the calculation error due to the effect of the
other loops.
3. The
EvoTune
type is suitable when:
•
You have no information about your process;
•
You can not be sure about the end user skills;
•
You desire an auto tune calculation independently
from the starting conditions (e.g. set point change
during tune execution, etc).
Note:
Fast auto-tune can start only when the measured
value (PV) is lower than (SP + 1/2SP).
Available:
When [55] cont = PID
Range:
-4... 8 where:
-4 =
Oscillating auto-tune with automatic restart
at all set point change;
-3 =
Oscillating auto-tune with manual start;
-2 =
Oscillating auto-tune with automatic start at
the first power up only;
-1 =
Oscillating auto-tune with automatic restart
at every power up;
0 =
Not used;
1 =
Fast auto tuning with automatic restart at
every power up;
2 =
Fast auto-tune with automatic start at the
first power up only;
3 =
FAST auto-tune with manual start;
4 =
FAST auto-tune with automatic restart at all
set point change.
5 =
EvoTune with automatic restart at every
power up;
6 =
EvoTune with automatic start at the first
power up only;
7 =
EvoTune with manual start;
8 =
EvoTune with automatic restart at all set
point change.
Note:
All auto-tunes are inhibited during program execution.
[57] Aut.r - Manual start of the auto-tune
Available:
When [55] cont = PID.
Range:
oFF = The instrument is not performing the auto-tune;
on =
The instrument is performing the auto-tune.
[58] SELF - Self-tune enable
The self-tuning is an adaptive algorithm able to optimize
continuously the PID parameter value.
This algorithm is specifically designed for all process subjected to
big load variation able to change heavily the process response.