





























C
OMMAND
D
ATA
F
ORMAT
SMD34K User Manual
ADVANCED MICRO CONTROLS INC.
78
Input Data Format (continued)
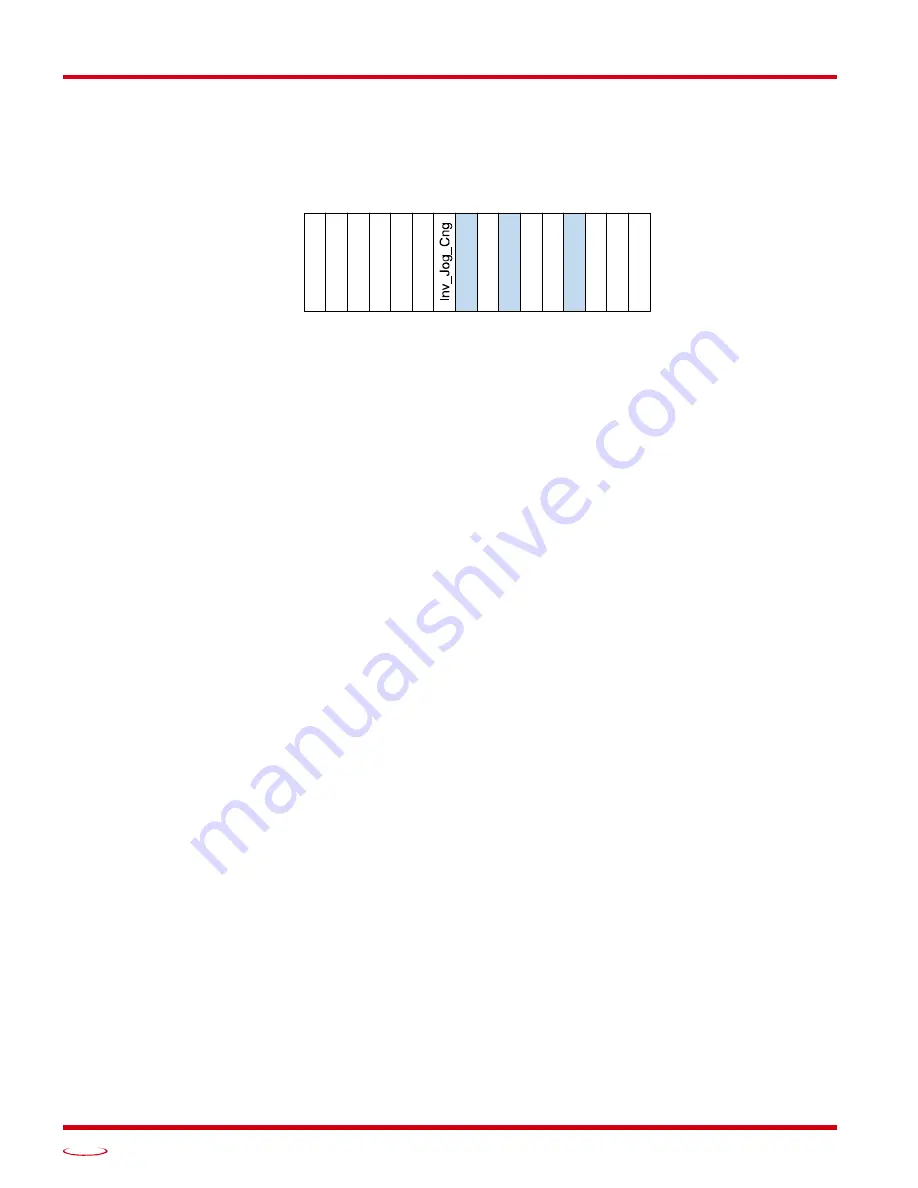
Status Word 1 Format
Figure R6.5 Command Mode: Status Word 1 Format
Bit 15: Drive_Is_Enabled –
Set to “1” when the motor driver section of the SMD34K is enabled and current
is available to the motor. Set to “0” when the motor driver section is disabled. If this bit is set to “1”,
the motor current remains present when an E-Stop input is active. Motor current is removed if there
is a Driver_Fault (Bit 7 below) regardless of the state of this bit.
Bit 14: Stall_Detected –
Set to “1” when a motor stall has been detected.
Bit 13: Command_Acknowledge –
Normally “0”. This bit is set to “1” when one of the following com-
mands completes successfully:
Preset Position
Preset Encoder Position
Reset Errors
This bit resets to “0” when the command bit is reset to “0” by the host controller.
Bit 12: Absolute Encoder Error –
Only available on units with the absolute encoder, this bit is set to “1”
under the following conditions:
The shaft was subject to acceleration in excess of 160,000°/sec
2
(444.4 rev/sec
2
) while power
was removed from the unit
The internal battery is fully discharged or damaged
The unit itself is damaged
If this bit is set, cycle power to the unit. If the bit remains set, contact AMCI technical support for
assistance.
Bit 11: Heartbeat_Bit –
This bit will change state approximately every 500 milliseconds. Monitor this bit to
verify that the unit and network connection are operating correctly. Note that this bit is only available
while the unit is in Command Mode.
Bit 10: Limit_Condition –
This bit is set if an End Limit Switch is reached during a move. This bit will be
reset when the Limit Switch changes from its active to inactive state, or when a Reset Errors Com-
mand is issued.
Bit 9: Invalid_Jog_Change –
Set during a Jog Move if parameters are changed to invalid values. Param-
eters that can be changed during a Jog Move are Programmed Speed, Acceleration, and Decelera-
tion. Issuing a Reset Errors command will not reset this bit. This bit will reset when valid jog data is
sent from the host controller.
Bit 8: Reserved –
Will always equal zero.
Status Word 1
15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
Dri
v
e_
Enab
le
d
Sta
ll_
Det
e
c
ted
Cm
d
_
Ack
Abs_En
c_E
rr
T
e
mp_90
°C
0
0
0
IN
3_Act
iv
e
IN
2_Act
iv
e
IN
1_Act
iv
e
Dr
iv
er_F
au
lt
Safe
Op
Li
mit
_
Cond
it
io
n
Heart
bea
t_
Bi
t
Содержание SMD34K
Страница 1: ...MICRO CONTROLS INC ADVANCED U s e r M anual Manual 940 0S280 ...
Страница 6: ...TABLE OF CONTENTS SMD34K User Manual ADVANCED MICRO CONTROLS INC 6 Notes ...
Страница 50: ...CALCULATING MOVE PROFILES SMD34K User Manual ADVANCED MICRO CONTROLS INC 50 Notes ...
Страница 62: ...CONFIGURATION DATA FORMAT SMD34K User Manual ADVANCED MICRO CONTROLS INC 62 Notes ...
Страница 80: ...COMMAND DATA FORMAT SMD34K User Manual ADVANCED MICRO CONTROLS INC 80 Notes ...
Страница 100: ...LEADERS IN ADVANCED CONTROL PRODUCTS ADVANCED MICRO CONTROLS INC ...







































































