















3
Gen IV Controller with Smart Arm Setup Instruction Manual
4. Hardware Connection
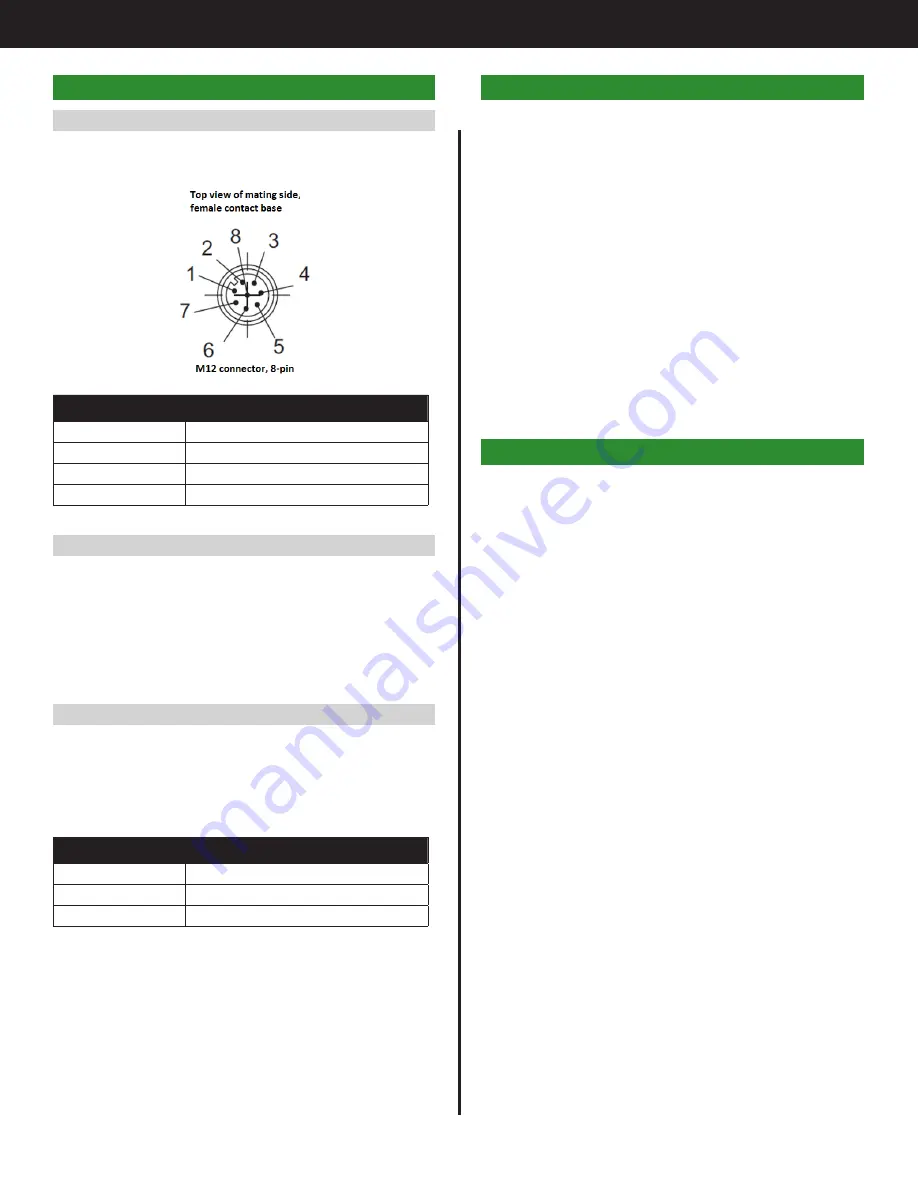
4.1 Connecting the Encoders
The encoders from the arm connect to the controller
via M12 connectors. The pinout is shown below.
Encoder Circuit M12-8 Bulkhead Connector Pin
0V
1
+12Vdc
2
A
3
B
5
4.2 Encoder Compatibility
The system is compatible with incremental encoders
with the following specifications:
•
Voltage: 12V
•
Signal output: Quadrature with A B outputs
•
Pulse rate: System verified with 2048 pulses per
revolution and lower
4.3 Connecting the Remote Home
An external remote home button can be added to
the accessory if needed. This will perform the same
function as the ‘Home’ button on the accessory
box. The homing function will be triggered when pin
4 on the M8 connection is pulled high to +12V.
External Circuit
M8-3 Bulkhead Connector Pin
0V
3
+12Vdc
1
Signal
4
5. Care Setup Steps Overview
This document covers the details of interfacing an
arm outfitted with encoders to a Gen IV Controller.
The general steps of the setup are:
1. Make all hardware connections
2. Power on the Smart Arm Accessory and Gen IV
Controller
3. Configure the accessory IP settings from the
controller
4. Add the Smart Arm accessory in the Gen IV
controller settings
5. Configure the accessory settings and add arm
locations
6. Add runscreen image (if required). Image must
be 470 x 550 pixels for best fit to controller screen
7. Configure line side control (if required)
6. Functionality Overview
The Smart Arm Accessory can interface with an
arm fitted with up to four encoders and/or proximity
sensors. A runscreen can be configured to show
fastener locations on a user uploaded image.
The controller is able to read the arm position
from the accessory box and perform an array of
different functions based on arm position. Setup
can be as simple as just selecting a PSet when the
arm is positioned over a fastener. It can also be
as complicated as combining line side control to
determine which fastener to insert with a Job and
Arm ensuring that the correct fastener is inserted in
the correct sequence while preventing fasteners
from being re-inserted.
Triggering the ‘Job Reset’ IO will clear the OK/NOK
status of any fasteners.
Содержание AcraDyne
Страница 15: ......







































































