





















4
TECHNICAL DATA
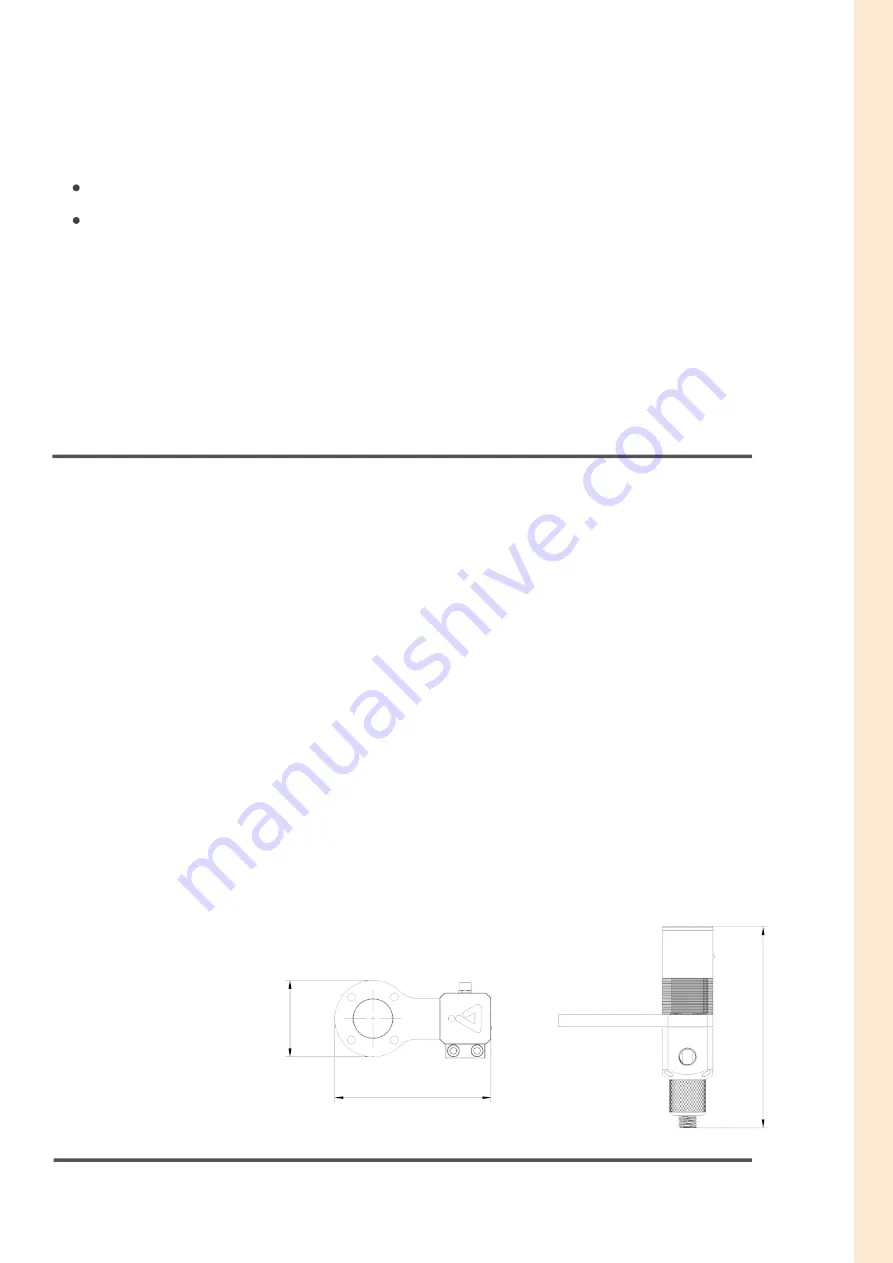
65
130
170
Use with external feeding system
Recommended for single-component medium to high
viscosity fluids
FDhighV FEATURES
Model # FDhighV
URCap version
≥
3.0
Mechanical interface: ISO 9409-1, type 50-4-M6
NPT 1/4
Electrical interface: 8-pole M8
Digital interfaces: URCap, PolyScope
≥
5.5
URCap, API
≥
1.8
RS485
24V I/O
Weight: 0.8kg
Dimensions: 65 x 130 x 170mm
F
D
h
ig
h
V
Содержание FD400
Страница 1: ...FD400 FDhighV USER MANUAL AIM ROBOTICS ORIGINAL INSTRUCTIONS EN VERSION 0 4 ...
Страница 23: ......







































































