





























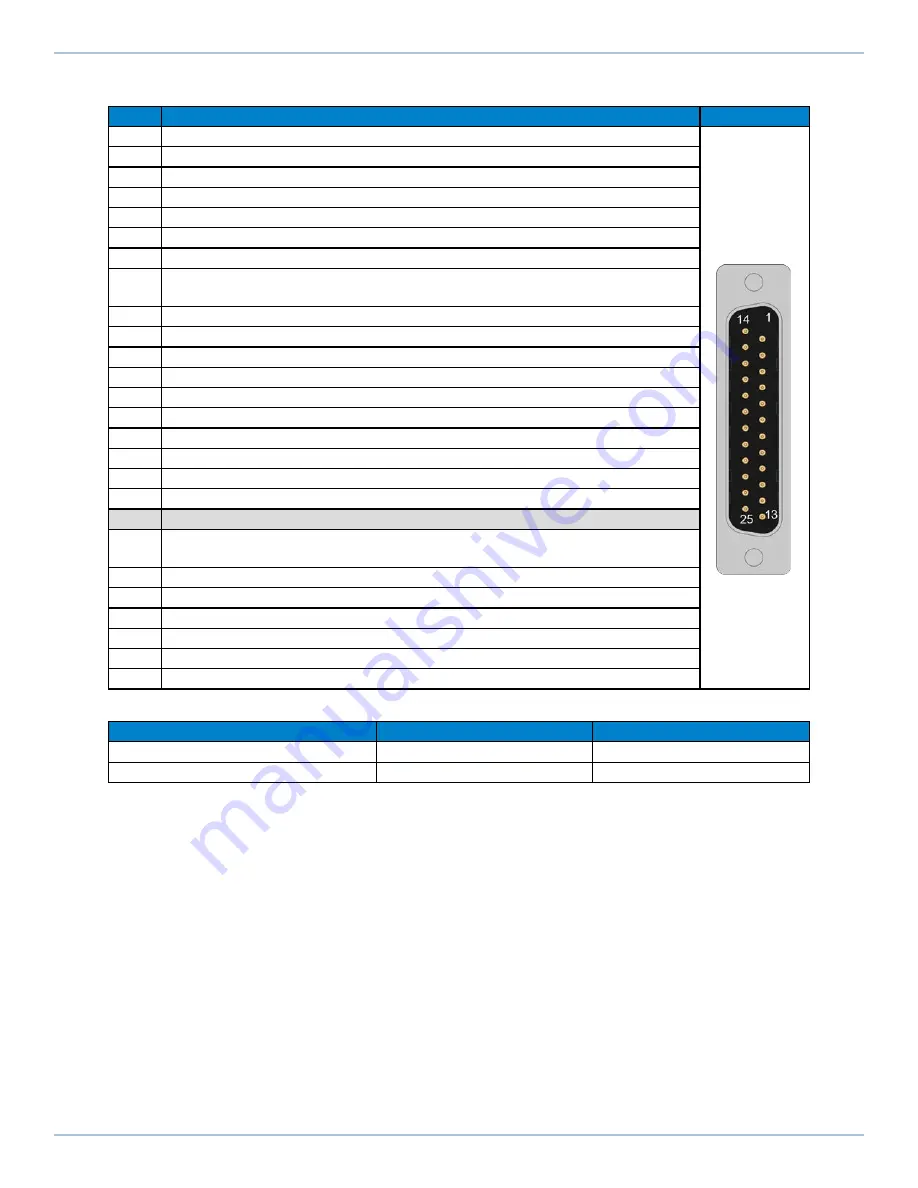
Table 3-1:
-E1 Option Motor and Feedback Pinout
Pin
Description
Connector
Case Shield Connection
1
Key (to make sure that the correct cable is plugged into the correct jack)
2
COS- (Encoder Cosine-)
3
SIN- (Encoder Sine-)
4
MRK- (Encoder Marker-)
5
Common ground
6
Common ground
7
-/CCW LMT (The limit signal that shows the maximum permitted machine
travel in negative or counterclockwise encoder counts.)
8
Hall Effect Sensor (Phase A)
9
Hall Effect Sensor (Phase C)
10
Frame Ground
11
Motor Phase A
12
Motor Phase B
13
Motor Phase C
14
COS+ (Encoder )
15
SIN+ (Encoder Sine+)
16
MRK+ (Encoder )
17
5V Power Supply Input
18
Reserved
19
+/CW LMT (The limit signal that shows the maximum permitted machine
travel in positive or clockwise encoder counts.)
20
Over-Temperature Thermistor Sensor
21
Hall Effect Sensor (Phase B)
22
Frame Ground
23
Motor Phase A
24
Motor Phase B
25
Motor Phase C
Table 3-2:
Mating Connector Part Numbers
Mating Connector
Aerotech P/N
Third Party P/N
25-Socket D-Connector
ECK00300
FCI DB25S064TLF
Backshell
ECK00656
Amphenol 17E-1726-2
HEX300-230HL Hardware Manual
3.1. Motor and Feedback Connectors
www.aerotech.com
27
Содержание HexGen HEX300-230HL
Страница 1: ...Revision 2 00 HexGen HEX300 230HL Hexapod Six DOF Positioning System HARDWARE MANUAL ...
Страница 6: ...This page intentionally left blank List of Tables HEX300 230HL Hardware Manual 6 www aerotech com ...
Страница 16: ...This page intentionally left blank 1 3 3 Homing HEX300 230HL Hardware Manual 16 www aerotech com ...
Страница 36: ...This page intentionally left blank 3 5 Feedback Phasing HEX300 230HL Hardware Manual 36 www aerotech com ...







































































