





























50
Operating Instructions
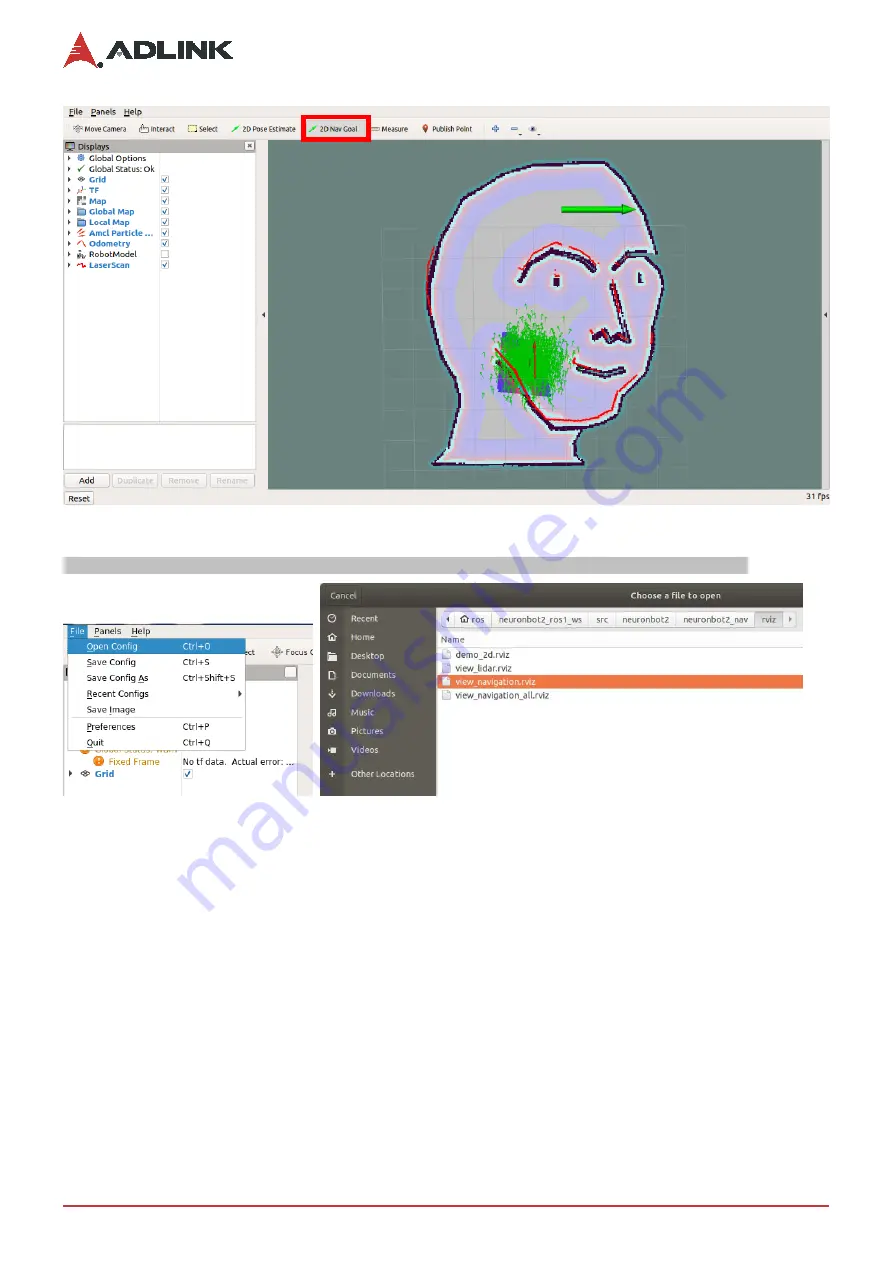
Tip:
Save time by opening the RViz config file in:
~/neuronbot2_ros1_ws/src/neuronbot2/neuronbot2_nav/rviz/view_navigation.rviz
5.4. ROS 2 Applications
This section describes how to build, compile, and run several applications with ROS 2 on NeuronBot, and provides
instructions on configuring NeuronBot for the following applications:
Teleoperation
: Move the NeuronBot using a keyboard and scan the surrounding environment using 2D LiDAR.
RViz (
ROS-VIsualiZation
)
monitoring
: Monitor Neuronbot during movement and laser scanning using RViz,
a
powerful 3D visualization environment for ROS
.
Simultaneous localization and mapping (SLAM)
: Configure NeuronBot to build a map during teloperation.
Guided navigation
: Navigate NeuronBot from a starting point to a destination with a map created using a
SLAM package.
5.4.1. Driver Startup and Teleoperation
To begin teleoperating NeuronBot, you must start the ROS driver in addition to all IO connections and sensory
devices such as the motor controller, encoder odometry, laser scanner, and IMU state estimation.
Terminal 1: