





























Pioneer LX User's Guide, Rev. A
Page 79 of 125
Chapter 7: Connectivity
Pioneer LX Internal Power Pinouts
Bumper
Connection
Mini-Fit
®
4 x 2
Connector type
DB9F
Use
Front bumpers
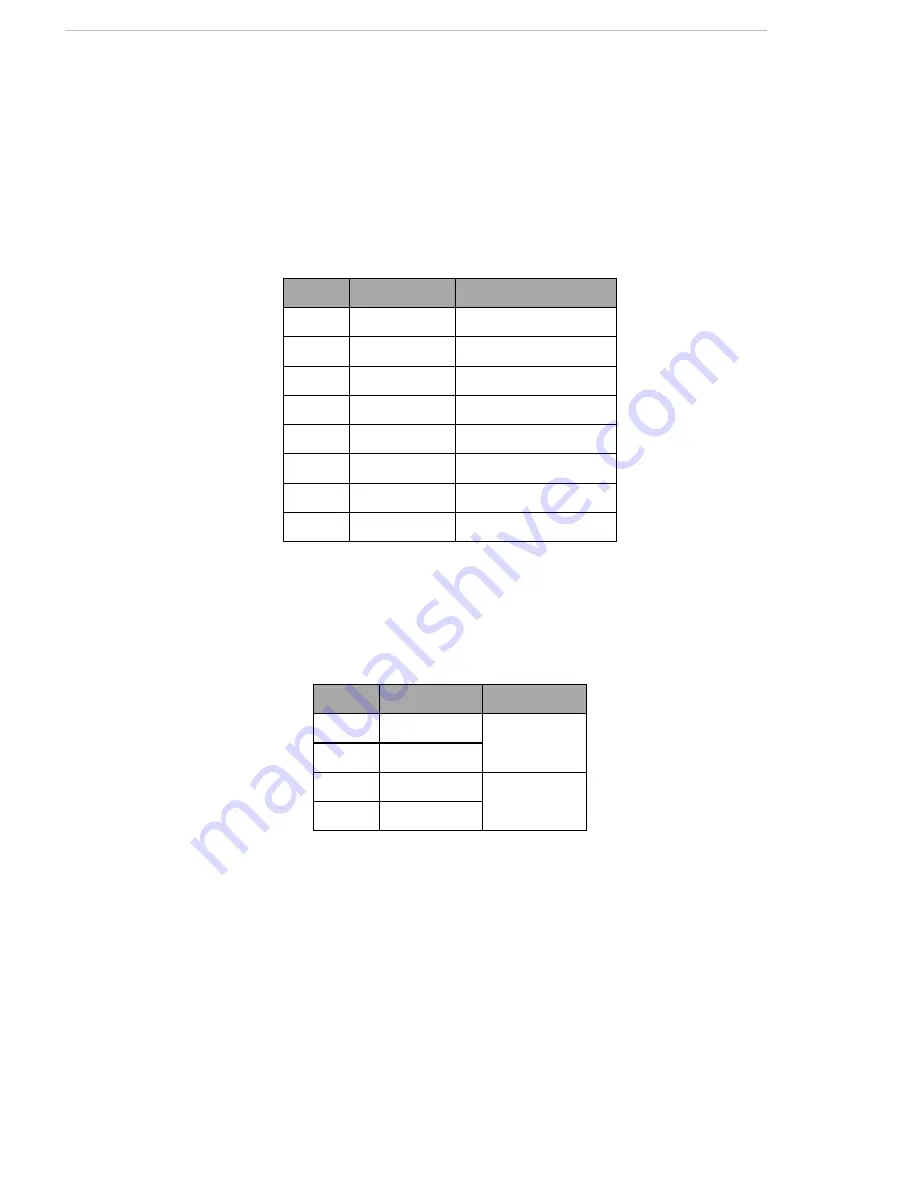
Pin No.
Designation
Notes
1
BUMPER_R2L
Right, Channel 2, Low
2
BUMPER_R1L
Right, Channel 1, Low
3
BUMPER_L2L
Left, Channel 2, Low
4
BUMPER_L1L
Left, Channel 1, Low
5
BUMPER_R2H Right, Channel 2, High
6
BUMPER_R1H Right, Channel 1, High
7
BUMPER_L2H
Left, Channel 2, High
8
BUMPER_L1H
Left, Channel 1, High
Speakers
Connector type
Mini-Fit
®
2 x 2
Use
Speakers
Pin No. Designation
Notes
1
RIGHT+
Right Speaker
2
RIGHT-
3
LEFT+
Left Speaker
4
LEFT-
Содержание Pioneer LX
Страница 1: ...User s Guide Rev A November 2013...
Страница 16: ......
Страница 32: ......
Страница 36: ......
Страница 48: ......
Страница 60: ......
Страница 82: ......
Страница 103: ...Pioneer LX User s Guide Rev A Page 103 of 125 Chapter 8 Maintenance Figure 8 16 Top of Laser Rangefinder...
Страница 108: ......
Страница 125: ...10 Colrumbia Drive Amherst NH 03450 USA Phone 1 603 881 7960 www mobilerobots com...





















































