




















REM 543 Protection,
Monitoring and Control
Page 39
Technical Reference Manual
Part 1, General
ABB Network Partner
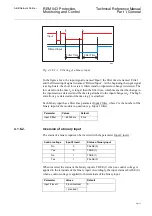
The supervision state (TCS1 and TCS2) is logical TRUE when the trip circuit condition
is OK and FALSE when a trip circuit fault has occurred. The TCSSTATE is used for
monitoring the supervision state. The function block has a user-defined delay parameter.
If the fault time exceeds the delay parameter time, the ALARM output of the function
block will be activated and a message will be received on the MMI.
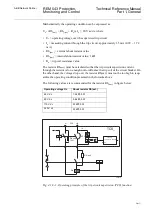
To avoid unnecessary alarms, the trip circuit supervision can be blocked by the BS sig-
nal. This allows the supervision output to be disabled when the circuit breaker is with-
drawn, i.e. when the status of both CB and CB truck is undefined (no voltage over
binary status inputs). In addition, to avoid unnecessary alarms, the trip circuit supervi-
sion function should be blocked by the BS signal when a trip signal initiated by a pro-
tection function is activated, i.e. when the trip contact of the machine terminal is closed.
For more information about the trip circuit supervision function, refer to the Technical
Descriptions of Functions for CMTCS1 and CMTCS2 (1MRS750889-MCD).
4.1.9.
Self-supervision (IRF)
The REM 543 machine terminal is provided with an extensive self-supervision system.
The self-supervision system handles run-time fault situations and informs the user of
faults via the MMI and LON/SPA communication.
Under normal operating conditions, the self-supervision output relay, i.e. the IRF output
relay, is energized and the contact gap X4.1/3-5 is closed. About 1 minute after a fault
has been detected or the auxiliary power has been lost, the green READY indicator
starts blinking. At the same time, the machine terminal delivers a fault signal to the IRF
relay, which operates i.e. the relay drops off and the NO contact X4.1/4-5 closes. Addi-
tionally, a fault indication text appears on the MMI of the machine terminal and an
event E57 is generated over the serial communication.
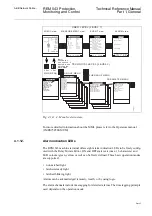
The fault indication text on the MMI consists of two rows as shown in the example
below:
SELF-SUPERVISION
INTERNAL FAULT
Fault indication has the highest priority on the MMI and no other MMI indication can
overrun an IRF indication. The fault indication text is displayed until cleared by press-
ing the C button for 2 seconds. Then the green READY indicator still remains blinking.
If the internal fault disappears, the fault indication text remains on the display unless it
has been cleared and the green READY indicator stops blinking. In addition, an event
E56 is generated over the serial communication.