





























n
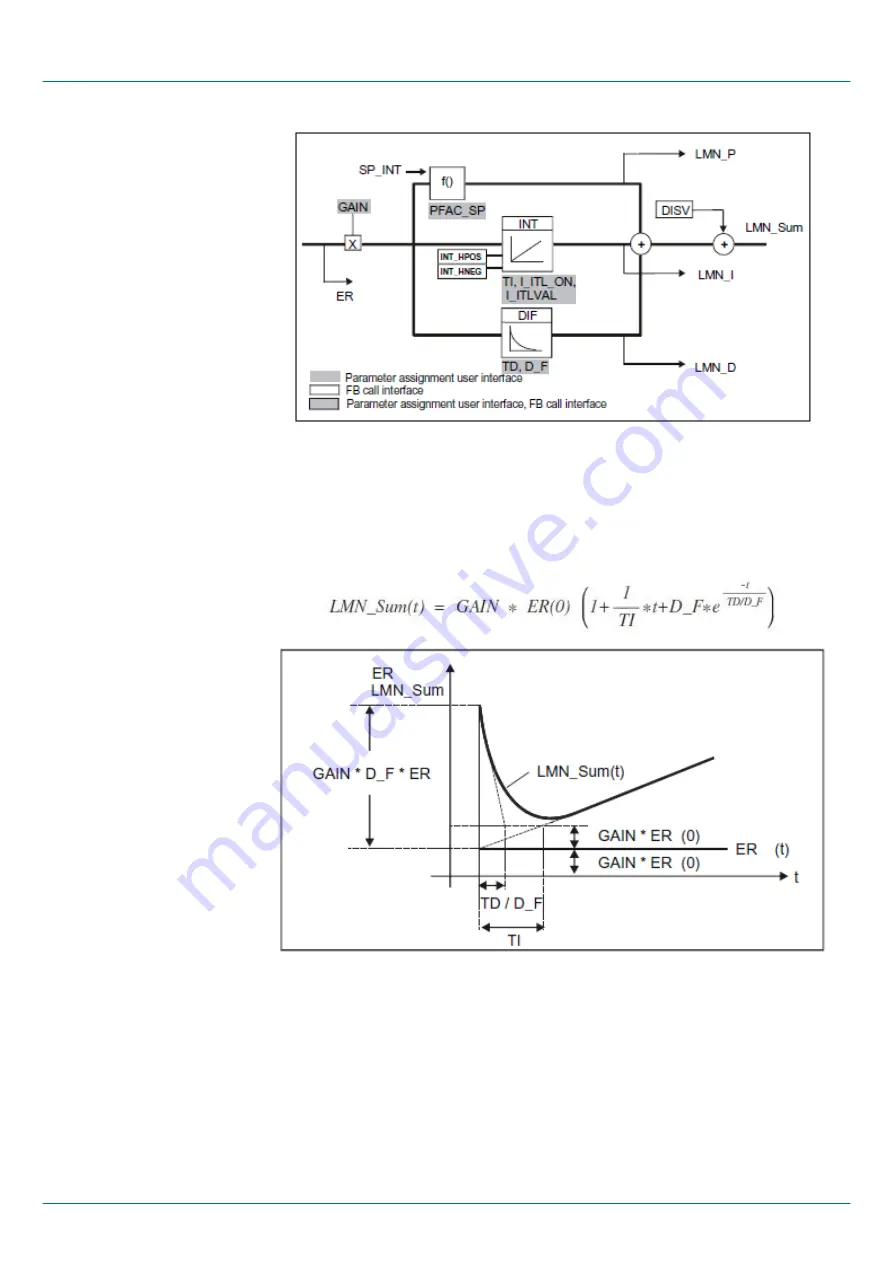
The PID algorithm operates as a position algorithm. The proportional, integral (
INT
),
and derivative (
DIF
) actions are connected in parallel and can be activated or deacti-
vated individually. This allows P, PI, PD, and PID controllers to be configured.
n
The controller tuning supports PI and PID controllers. Controller inversion is imple-
mented using a negative
GAIN
(cooling controller).
n
If you set
TI
and
TD
to 0.0, you obtain a pure P controller at the operating point.
LMN_Sum(t) manipulated variable in automatic mode of the controller
ER (0)
step change of the normalized error
GAIN
controller gain
TI
integral time
TD
derivative time
D_F
derivative factor
In the manual mode, it is corrected as follows:
LMN_I = LMN - LMN_P - DISV
PID Algorithm (GAIN, TI,
TD, D_F)
Integrator (TI, I_ITL_ON,
I_ITLVAL)
VIPA SPEED7
Standard
PID Control > FB 58 - TCONT_CP - Continuous Temperature Control
HB00 | OPL_SP7 | Operation list | en | 18-30
867